Getting curvy with styrofoam
Styrofoam fascinates with its many possible applications. Complex, curvy shapes, however, are difficult to produce with conventional cutting tools. For this, Simon Dünser puts a robot to work that efficiently and precisely wields a hot wire.
What is new about your way of cutting styrofoam?
Typically, styrofoam is cut with a hot wire that is stretched firmly into a straight line. The straight wire easily cuts flat surfaces or surfaces, which are curved in only one spatial direction. Ball-shaped objects are difficult, bowl-shaped objects are impossible to cut.

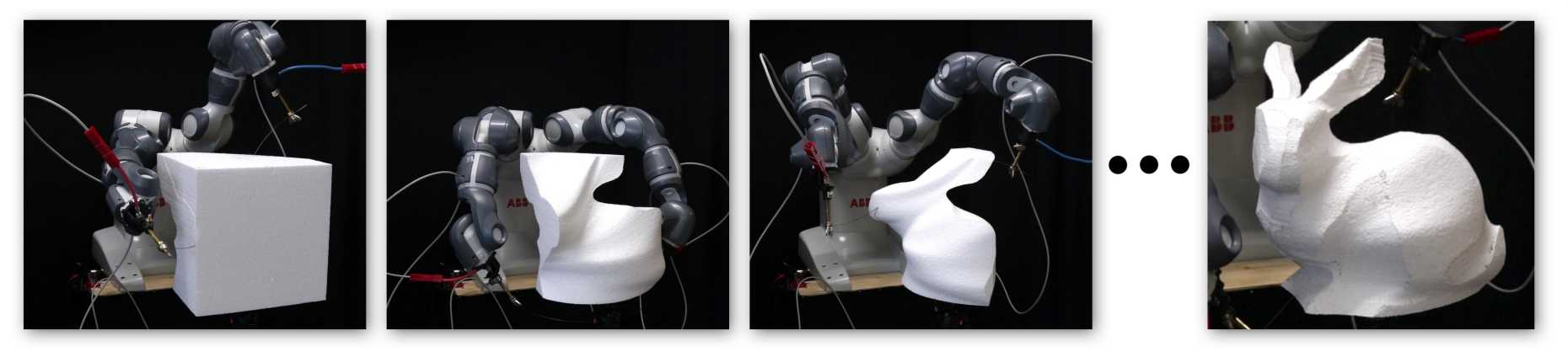
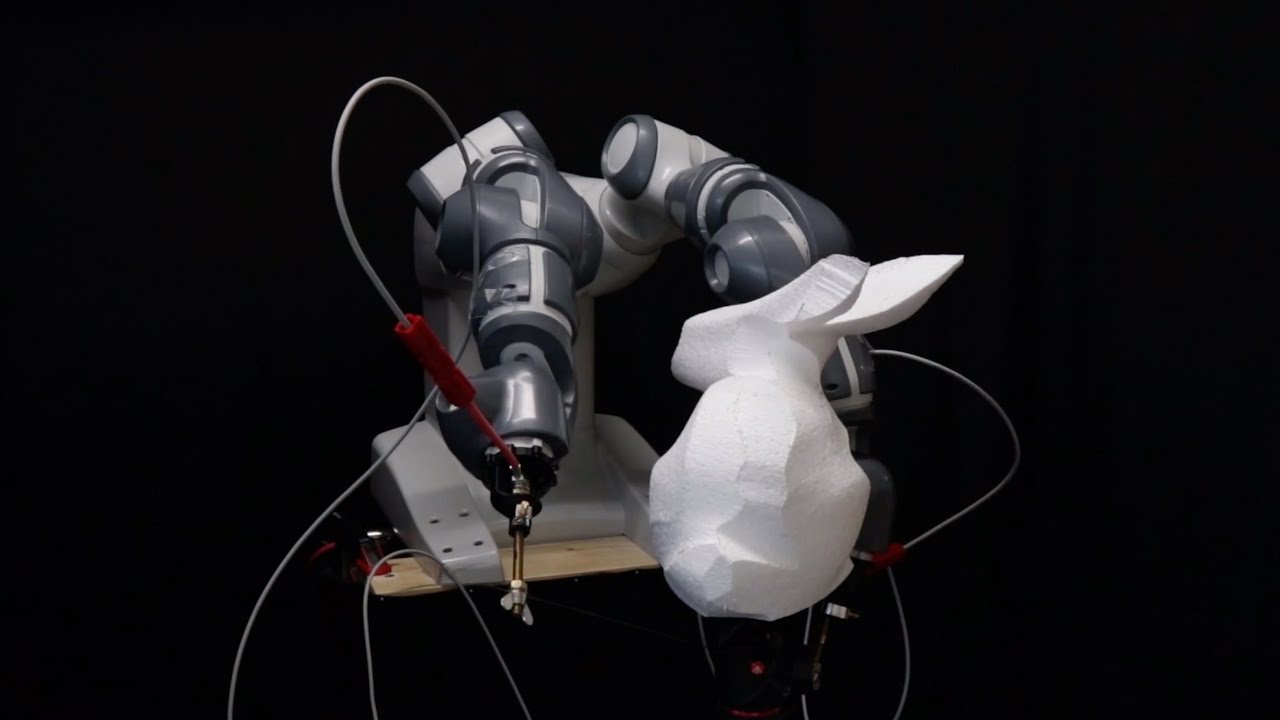
In our set-up, a two-armed robot sweeps a deformable wire through the styrofoam block. The robot pulls, bends and twists the wire while cutting. This procedure efficiently produces surfaces with varying curvatures. The bunny shape, for example, was created with just ten cuts (see fig. 2)
Who controls the robot?
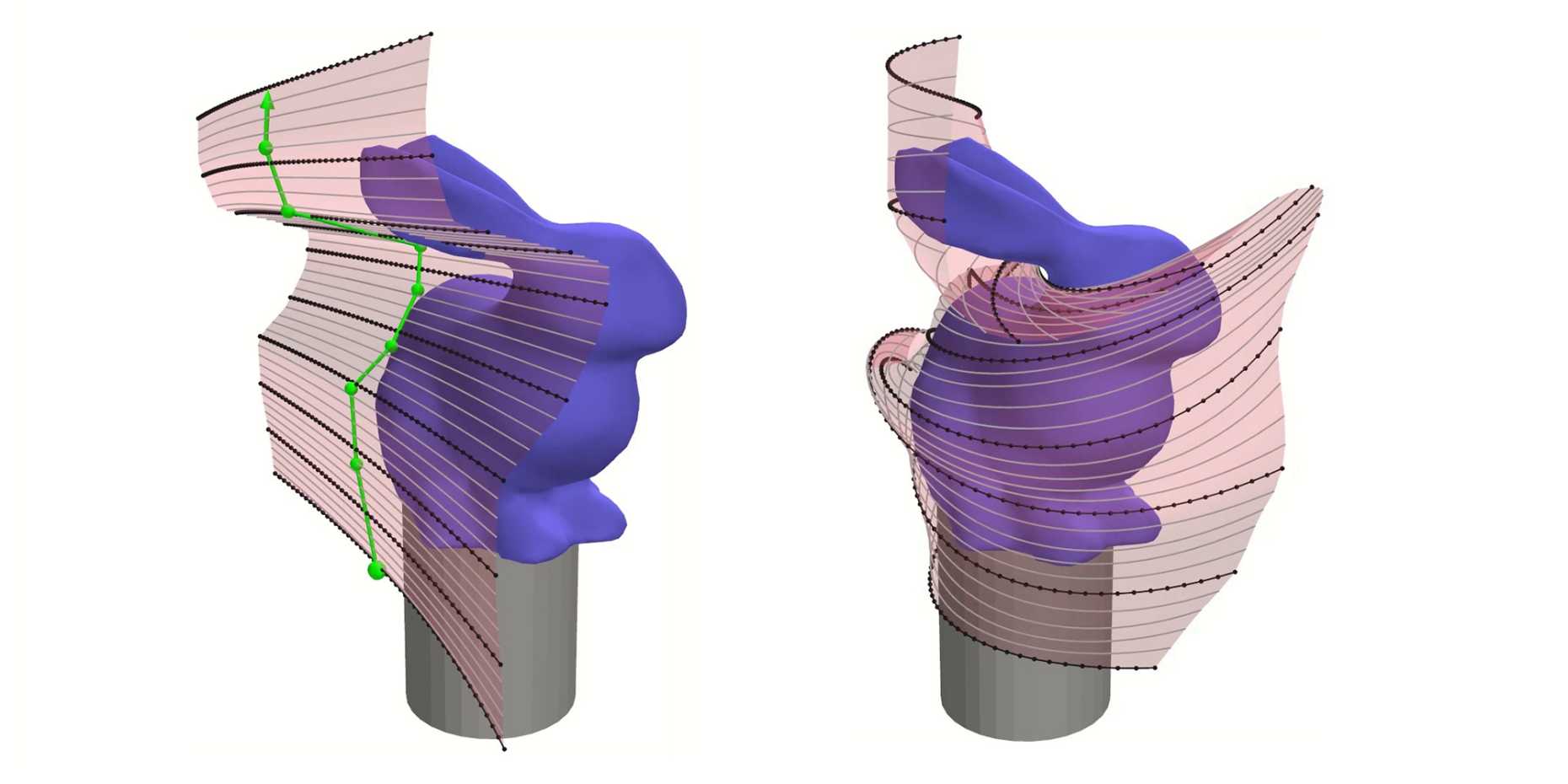
The robot operates to a large extent autonomously. It plans and optimises the cuts. In this process, the robot can neither see nor feel the wire. We have invented an algorithm that creates virtual copies of the real wire and the real styrofoam block. The robot plans its work steps in this virtual world and checks that the wire does not break and the rabbit is not knocked off its pedestal.
What are the challenges?
The result, that is the fully cut shape, is only as good as our representation of reality in the robot's virtual workspace. Many interconnected sub-problems must be solved simultaneously. How does the wire bend? Which collision-free motions can the robot-arms perform? What are the best cuts to realise the given geometry in the styrofoam? This leads to a complex optimisation problem, for which we needed to compute the solution. Since we did not want a normal computer to calculate for an eternity, we had to find an efficient way to solve this problem. Our algorithm takes four minutes for simple shapes and up to four hours for complex shapes. The bunny is at a medium level of difficulty and takes about two hours of computation.
What were the pitfalls?
Simulating the material properties of the wire was one of our first mistakes. Material datasheets provide information on how much a wire can bend without taking damage. We took the data from the manufacturer and disregarded the fact that we do not work at room temperature, but heat the wire for the cutting process. A hot wire loses its elasticity at much lower stress levels and changes its rest-shape permanently when bent. In the end, the real wire cut a different surface than the simulated wire and the result was not a bunny. After these initial hiccups, however, the process has proven to be surprisingly robust.
How did the patent application come about?
The group of Prof. Coros works primarily in applied research. The overarching goal is to help robots understand the physical world around them, so that they can navigate our world better and become skilled co-workers. In the presented case, we see a commercial potential for cutting styrofoam, which suggested a patent application. The robotic hot-wire cutting facilitates the production of sculptures and prototypes. The styrofoam objects can be used as elements in set design, as insulation in plant construction or formworks in concrete casting. We are looking forward to getting in touch with partners from industry.

Contact/Links:
Prof. Stelian Coros, Institute for Intelligent Interactive Systems
Publication: “external pageRoboCut: Hot-wire Cutting with Robot-controlled Flexible Rods.”, ACM Trans. Graph. 39, 4, Article 98 (July 2020)
Patent pending (please contact ETH transfer for further information)
Do you want to get more "News for Industry" stories?
external pageSubscribe to our newsletter
external pageFollow us on LinkedIn
Are you looking for research partners at ETH Zurich?
Contact ETH Industry Relations