I ricercatori dell'ETH di Zurigo e del Max Planck Institute for Intelligent Systems hanno sviluppato una gamba robotica con muscoli artificiali. Ispirata alle creature viventi, salta su diversi terreni con agilità ed efficienza energetica.

In breve
- I ricercatori hanno sviluppato la prima gamba robotica alimentata da muscoli elettroidraulici artificiali che si adatta automaticamente ai terreni irregolari.
- Il sistema è più efficiente dal punto di vista energetico rispetto ai motori elettrici e consente salti elevati e movimenti rapidi senza sensori complessi.
- Sebbene la tecnologia sia ancora agli inizi, offre un potenziale per future applicazioni nella robotica morbida.
Inventori e ricercatori lavorano allo sviluppo di robot da quasi 70 anni. Tutte le macchine che hanno costruito, che oggi si trovano nelle fabbriche e altrove, hanno una cosa in comune: sono azionate da motori, una tecnologia che ha già 200 anni. Anche i robot che camminano non azionano le braccia e le gambe con i muscoli, come sappiamo dall'uomo e dagli animali, ma con i motori. Di conseguenza, mancano di una parte della mobilità e dell'adattabilità delle creature viventi.
Una nuova gamba robotica alimentata da muscoli non solo è più efficiente dal punto di vista energetico rispetto a una gamba convenzionale, ma è anche in grado di eseguire salti elevati e movimenti veloci, nonché di riconoscere e reagire agli ostacoli - il tutto senza sensori complessi. Il robot è stato sviluppato da ricercatori dell'ETH di Zurigo e del Max Planck Institute for Intelligent Systems (MPI-IS) nell'ambito della partnership di ricerca nota come Max Planck ETH Centre for Learning Systems (CLS). Il team del CLS è stato guidato da Robert Katzschmann dello Laboratorio di robotica soft,ETH di Zurigo e Christoph Keplinger dell'MPI-IS. I loro dottorandi Thomas Buchner e Toshihiko Fukushima sono i primi autori della pubblicazione sulla rivista Chi siamo di una gamba robotica muscoloscheletrica ispirata agli animali. pagina esternaComunicazioni sulla natura.
Carico elettricamente come un palloncino
Come negli esseri umani e negli animali, un muscolo estensore e uno flessore assicurano che la gamba del robot possa muoversi in entrambe le direzioni. Questi attuatori elettroidraulici, che i ricercatori chiamano HASELs, sono collegati allo scheletro tramite tendini.

Gli attuatori sono sacchetti di plastica riempiti di olio, simili ai sacchetti di plastica usati per fare i cubetti di ghiaccio. Circa metà del sacchetto è rivestito su entrambi i lati con un elettrodo nero, cioè un materiale conduttore. Buchner spiega: "Non appena applichiamo la tensione agli elettrodi, questi si attraggono a vicenda a causa dell'elettricità statica. Se strofino un palloncino contro la mia testa, i miei capelli si attaccano al palloncino a causa della stessa elettricità statica". Aumentando la tensione, gli elettrodi si avvicinano e spingono l'olio nella sacca da un lato, rendendo la sacca complessivamente più corta.
Coppie di questi attuatori, collegati a uno scheletro, determinano gli stessi movimenti muscolari accoppiati degli esseri viventi: Quando un muscolo si accorcia, la sua controparte si allunga. Chi siamo, grazie a un codice informatico che comunica con amplificatori ad alta tensione, controlla quali attuatori devono contrarsi e quali allungarsi.
Più efficiente dei motori elettrici
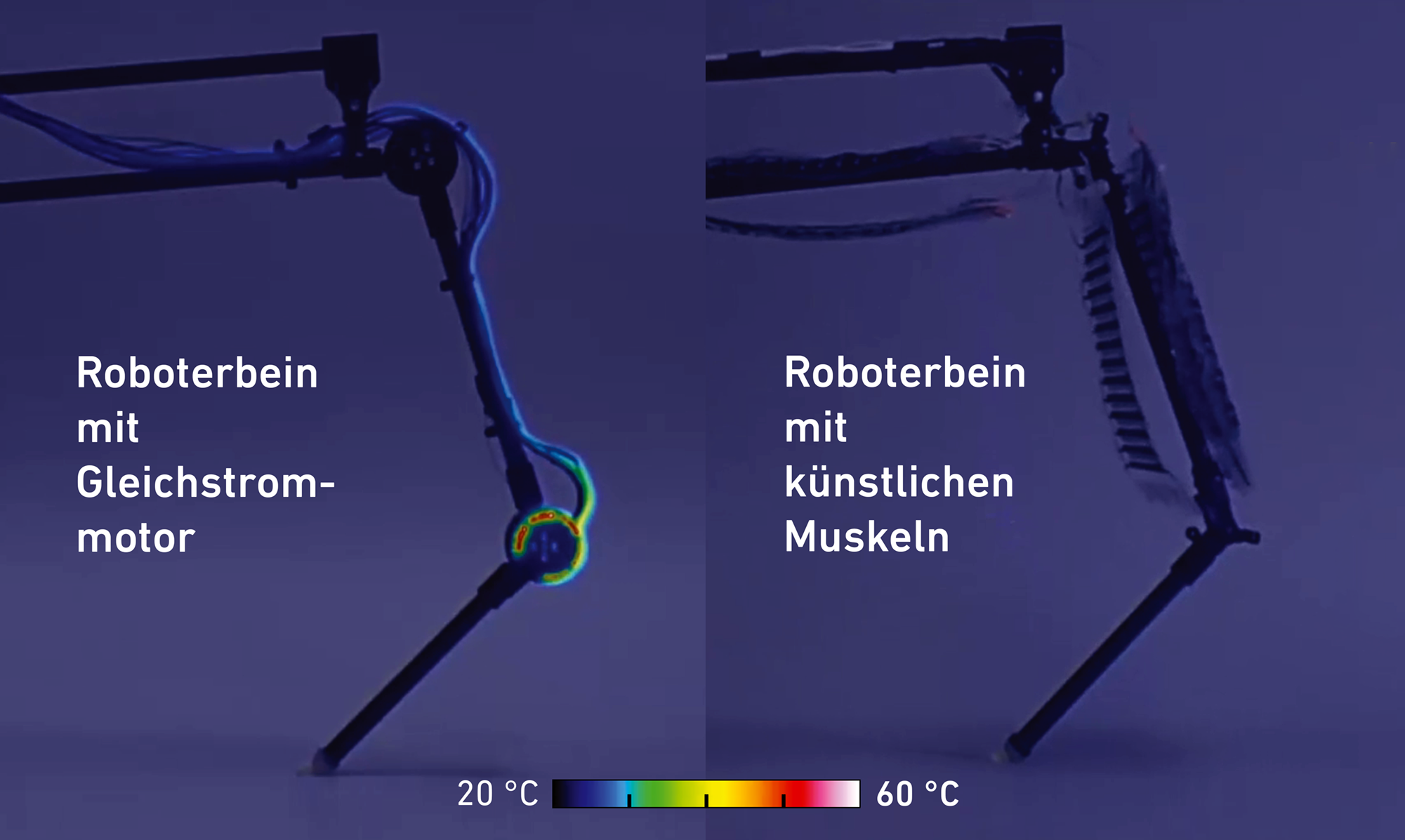
I ricercatori hanno confrontato l'efficienza energetica della loro gamba robotica con quella di una gamba robotica convenzionale azionata da un motore elettrico. Tra le altre cose, hanno analizzato quanta energia viene inutilmente convertita in calore. "Nell'immagine a infrarossi si nota subito che la gamba motorizzata consuma molta più energia se deve essere tenuta in posizione piegata, ad esempio", spiega Buchner. Al contrario, la temperatura della gamba azionata elettroidraulicamente rimane invariata. Questo perché il muscolo artificiale è elettrostatico. "È come l'esempio del palloncino e del capello, dove il capello rimane attaccato al palloncino per molto tempo", aggiunge Buchner. "I motori elettrici richiedono una regolazione del calore, il che significa che sono necessarie unità di raffreddamento o ventole aggiuntive per dissipare il calore nell'aria. Il nostro sistema non richiede tali componenti", afferma Fukushima.
Locomozione agile su un terreno irregolare Chi siamo
La capacità di salto della gamba robotica si basa sulla sua capacità di sollevare il proprio peso in modo esplosivo. I ricercatori hanno anche potuto dimostrare che la gamba robotica ha un alto grado di adattabilità, particolarmente importante per la robotica morbida. Solo se il sistema muscolo-scheletrico ha un'elasticità sufficiente, può adattarsi agilmente al rispettivo terreno. "Non è diverso dagli esseri viventi. Se non possiamo piegare le ginocchia, ad esempio, abbiamo grandi difficoltà a camminare su una superficie irregolare", spiega Katzschmann. "Basti pensare al passaggio dal marciapiede alla strada".

Mentre un sensore deve costantemente comunicare al motore elettrico l'angolazione della gamba robotica, il muscolo artificiale si adatta in modo adattivo interagendo con l'ambiente. Riceve costantemente gli stessi due segnali di ingresso di un motore: uno per la flessione e uno per l'estensione dell'articolazione. Fukushima spiega: "La capacità di adattarsi al terreno è un aspetto fondamentale. Quando una persona salta in aria e atterra, non deve pensare se deve piegare le ginocchia con un angolo di 90 o 70 gradi". Lo stesso principio si applica alla gamba robotica muscoloscheletrica: se l'ambiente è morbido, la gamba robotica raggiunge un angolo di articolazione diverso rispetto a una superficie dura.
-

Osservano la locomozione della gamba robotica: Fukushima (sinistra) e Buchner (destra). (Immagine: Wolfram Scheible / MPI-IS) -

La gamba robotica funziona secondo lo stesso principio delle gambe umane quando saltano. (Immagine: Wolfram Scheible / MPI-IS)


La tecnologia emergente apre nuove possibilità
Il campo di ricerca degli attuatori elettroidraulici è ancora giovane ed esiste solo da circa sei anni. "Il campo della robotica sta facendo rapidi progressi nella tecnologia di controllo e nell'apprendimento automatico; al contrario, sono stati fatti molti meno progressi nell'altrettanto importante sviluppo dell'hardware dei robot. La nostra pubblicazione ci ricorda quanto potenziale di innovazione risieda nell'introduzione di nuovi concetti hardware, come l'uso di muscoli artificiali", afferma Keplinger. Katzschmann aggiunge che è improbabile che gli attuatori elettroidraulici vengano utilizzati nei macchinari pesanti nei cantieri, ma offrono vantaggi specifici rispetto ai motori elettrici standard, soprattutto nelle applicazioni con mani robotiche, dove il movimento deve essere altamente personalizzato e adattivo a seconda che si tratti, ad esempio, di una palla, un uovo o un pomodoro.
Tuttavia, Katzschmann mette in guardia: "Il sistema attuale è ancora limitato rispetto ai robot che camminano con motori elettrici. Al momento, la gamba è attaccata a un'asta, saltella in cerchio e non può ancora muoversi liberamente". Il lavoro futuro dovrebbe superare queste limitazioni in modo da poter sviluppare veri e propri robot deambulanti con muscoli artificiali. E prosegue: "Se combiniamo la tecnologia della gamba robotica in un robot a quattro gambe o in un robot umanoide con due gambe, un giorno, una volta alimentato a batteria, potremo usarlo anche come robot di salvataggio".
Un'efficace collaborazione internazionale
Il Centro Max Planck ETH per i sistemi di apprendimento (CLS) è una partnership tra l'Istituto Max Planck per i sistemi intelligenti (MPI-IS) in Germania e i dipartimenti di ingegneria dell'ETH di Zurigo, in Svizzera. Il CLS si occupa di questioni di ricerca interdisciplinari riguardanti la progettazione e l'analisi di sistemi di apprendimento naturali e artificiali. Lo studio descritto sopra è un esempio ideale di progetto di ricerca collaborativo sull'intelligenza fisica sotto l'egida del CLS.
Dal 2015, questa partnership porta avanti la ricerca e forma i futuri leader della ricerca. L'elemento centrale è un programma di borse di dottorato a supervisione congiunta. Ogni borsista ha un supervisore dell'ETH di Zurigo e del MPI-IS ed è ospitato principalmente nel gruppo del suo supervisore principale, trascorrendo uno scambio di 12 mesi presso la sede del co-consulente. I borsisti CLS ricevono il dottorato dall'ETH di Zurigo. Più di 60 giovani ricercatori hanno già conseguito il dottorato secondo questo modello. pagina esternaUlteriori informazioni sul CLS.
Riferimento alla letteratura
Buchner TJK, Fukushima T, Kazemipour A, Gravert SD, Prairie M, Romanescu P, Arm P, Zhang Y, Wang X, Zhang SL, Walter J, Keplinger C, Katzschmann RK: Gamba robotica muscoloscheletrica elettroidraulica per una locomozione agile, adattiva e a basso consumo energetico. Nature Communications, 9 settembre 2024, doi: pagina esterna10.1038/s41467-024-51568-3