Le C2D2 sur la voie de la corrosion
Lorsque les ponts vieillissent, ils deviennent un problème pour l'infrastructure de transport, car les sels de déneigement et le dioxyde de carbone détruisent le béton armé avec le temps. Un nouveau robot vérifie désormais l'état des ouvrages, même dans les endroits inaccessibles à l'homme.
À propos des ponts autoroutiers Plus de 3500 ponts autoroutiers en Suisse nous permettent de franchir à tout moment, rapidement et en toute sécurité, des vallées, des ruisseaux, des rivières ou des voies de communication. A cela s'ajoutent des milliers de ponts de routes cantonales. La plupart d'entre eux ont deux caractéristiques en commun : ils sont indispensables à l'infrastructure de transport suisse et ils sont en béton armé. Ils sont ainsi sûrs et durables - du moins jusqu'à ce que la corrosion s'installe.
La corrosion met en danger les infrastructures suisses
Par corrosion, on entend la destruction de l'acier d'armature dans le béton en raison de la pénétration de chlorure provenant du sel de déneigement ou de la neutralisation du béton par le CO2 de l'atmosphère a été comprise. La destruction progresse de plus en plus avec le temps et n'est généralement visible que lorsqu'elle est déjà très avancée. A terme, cela peut compromettre l'aptitude au service et la sécurité des ponts et autres structures porteuses en béton armé. En outre, l'assainissement de ces ponts engloutit des sommes importantes, car plus les dommages dus à la corrosion sont importants, plus la réparation est onéreuse. "A cela s'ajoute le fait que de nombreux ponts en Suisse ont désormais plus de 50 ans, ce qui fait de la corrosion un problème de plus en plus important pour l'infrastructure suisse", explique Bernhard Elsener, professeur à l'Institut des matériaux de construction de l'ETH Zurich.
Avec une équipe de chercheurs, il a donc développé il y a 25 ans déjà une technologie permettant de détecter la corrosion à un stade précoce : Ils ont fixé une électrode sur une roue et l'ont déplacée sur la surface du béton armé. Le capteur mesure alors les différences de potentiel électrique du béton armé testé. Des différences de potentiel plus importantes signifient que l'armature du béton a déjà commencé à se corroder dans ces zones. Les données de mesure sont transmises à un ordinateur et analysées.
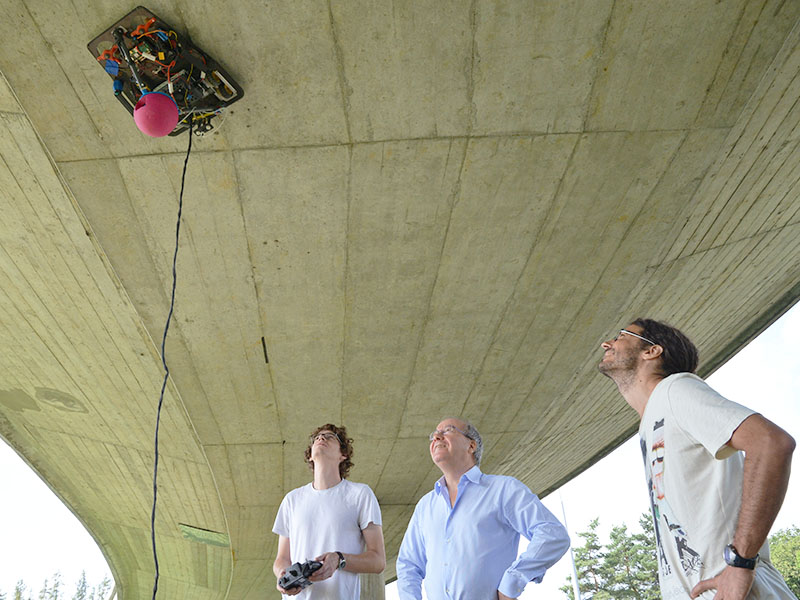
Cette technologie, la mesure du champ potentiel, est déjà utilisée avec succès depuis longtemps pour l'inspection des ponts, explique Elsener. Un problème subsiste toutefois : "L'électrode de roue est fixée à un bâton et doit être guidée à la main. De ce fait, de nombreuses zones, comme par exemple les piliers et les faces inférieures des ponts élevés, ne peuvent pas être détectées", explique Elsener.
Un robot pour détecter la corrosion
Pour résoudre ce problème, l'Institut des matériaux de construction s'est associé à l'Institut de robotique et de systèmes intelligents et a formé une équipe de projet composée de Bernhard Elsener, Alexis Leibbrandt, Oliver Glauser, Ueli Angst et Robert Flatt de l'Institut des matériaux de construction, ainsi que de Gilles Caprari de l'Autonomous Systems Lab de l'ETH Zurich. L'objectif était de développer un robot capable de détecter la corrosion à un stade précoce et à des endroits inaccessibles à l'homme. Les chercheurs n'ont pas eu à chercher longtemps une solution : "Dans le cadre d'un de nos projets Focus, des étudiants ont développé il y a quatre ans un robot capable de se déplacer aussi bien sur le sol que sur les murs et les plafonds. Il était donc idéal pour le projet prévu", raconte Roland Siegwart, professeur à l'Institut de robotique et de systèmes intelligents et Vice-président pour la recherche et les relations économiques de l'ETH Zurich.
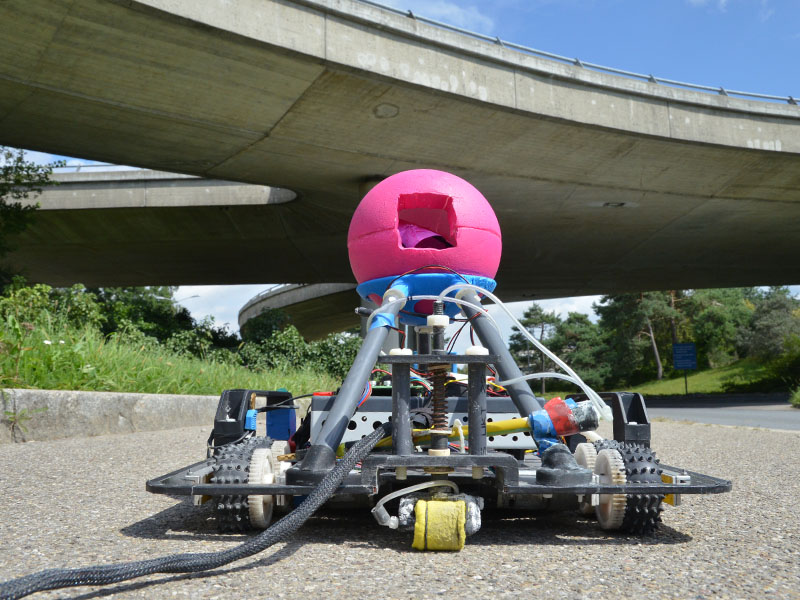
La locomotion de ce robot est basée sur la technologie dite du vortex : sur la face inférieure du robot se trouve une sorte d'hélice qui tourne si vite que le robot est aspiré par la dépression qui se crée sur les murs et les plafonds et peut se déplacer à l'aide de ses roues. Il est commandé à distance ou par ordinateur.
Paraswift devient C2D2
"À l'origine, le robot s'appelait Paraswift et a été développé en vue de son utilisation par Disney. Si une caméra est vissée sur le robot, une pièce peut être filmée sans problème sous tous les angles", explique Siegwart. Pour le nouveau projet des deux instituts, Paraswift a été rebaptisé C2D2 ("Climbing Corrosion Detecting Device") et adapté à sa nouvelle utilisation en tant que détecteur de corrosion : "Nous avons rendu le boîtier et les roues plus robustes et avons intégré la technologie de détection de la corrosion", explique Elsener, qui dirige le projet.
L'électrode se trouve sur la face inférieure du robot et mesure la différence de potentiel du béton armé pendant que le robot se déplace sur l'ouvrage. Ces données doivent ensuite être évaluées par un spécialiste. En outre, les ingénieurs ont installé une sphère rose sur la partie supérieure du robot afin que les caméras puissent le reconnaître facilement et que les chercheurs puissent ainsi le localiser et mieux le diriger. Dans cette sphère se trouve une autre caméra qui filme l'environnement. Cela permet de détecter d'éventuels obstacles et de les contourner.
Les premiers tests ont été concluants
D'ici la fin du projet, mi-2015, le robot devrait être capable de détecter et de contourner lui-même de tels obstacles. En outre, les chercheurs veulent remplacer la commande manuelle du robot par un système de navigation qui rendra le robot autonome. Et ils sont en train de développer un logiciel qui évalue lui-même une grande partie des nombreuses données de mesure.
Dès 2012, l'équipe du projet a déposé une demande de brevet pour le robot. Les entreprises qui souhaitent page externeLicence peuvent s'adresser à ETH transfer, le service de transfert de technologie de l'ETH. Jusqu'à présent, le C2D2 a déjà été testé sur différents ponts en Suisse et il a largement fait ses preuves. Seule la conduite sur des plans verticaux doit encore être optimisée par les ingénieurs. D'autres tests suivront jusqu'à la fin du projet. Sur la base des résultats, l'office fédéral des routes (Astra), qui finance le projet, décidera si le C2D2 doit être utilisé à l'avenir pour les inspections régulières des ponts. Le professeur Elsener le conseillerait dans tous les cas : "Le C2D2 peut contribuer à une infrastructure sûre et durable à un coût relativement faible - et c'est aussi ce qui a motivé le projet".
Le 13 juin 2014, le C2D2 a été récompensé lors d'une compétition internationale à la page externeConférence sur l'innovation en béton (COIN) a été récompensé par un prix dans la catégorie "Prolongation de la durée de vie du service". Ce concours a eu lieu pour la première fois cette année.
