Sur la piste de l'évolution humaine avec des robots
Grâce à des robots, les archéologues pourront peut-être bientôt comparer leurs découvertes avec les données de milliers d'échantillons de référence et déterminer ainsi l'utilisation d'outils de l'âge de pierre. Des scientifiques de l'ETH ont développé un système robotique correspondant et l'ont présenté au salon industriel de Hanovre.

Radu Iovita est archéologue. Il se souvient encore très bien de ses années d'études, lorsque, pour de l'argent de poche, il passait des heures à gratter des peaux d'animaux avec des répliques d'outils trouvés sur des sites archéologiques. En analysant les traces d'utilisation au microscope, les archéologues voulaient en déduire la manière dont les outils étaient utilisés il y a des milliers d'années. Cette méthode, connue sous le nom d'"analyse des traces d'utilisation", est aujourd'hui la norme dans l'archéologie expérimentale moderne.
"L'analyse manuelle des traces d'utilisation prend toutefois un temps incroyable et, surtout, nous ne pouvons pas contrôler des facteurs tels que la force avec laquelle un outil est utilisé ou sa position", explique Iovita. Ces dernières années, il a cherché à plusieurs reprises des moyens de réaliser des expériences contrôlées. Un premier succès a été un système qui a permis de tester de manière contrôlée l'usure des pointes de lances de l'âge de pierre en fonction de l'impact, à l'aide de canons à air.
Archéologue et roboticien s'associent
Mais l'archéologue était à la recherche de possibilités d'étudier systématiquement tous les outils et leurs formes d'application - et ce de manière aussi automatisée que possible. Iovita, aujourd'hui collaborateur scientifique au centre de recherche Monrepos (RGZM-Leibniz Institut de recherche für Archäologie) à Neuwied, en Allemagne, s'est souvenu de Jonas Buchli, professeur à l'Institut de robotique et de systèmes intelligents de l'ETH Zurich. Les deux hommes s'étaient rencontrés il y a dix ans lors d'une école d'été sur les systèmes complexes. Dès le début, le professeur de l'ETH a été enthousiasmé par l'idée de Iovita d'automatiser les recherches archéologiques grâce à l'utilisation de robots et de standardiser les mesures.
L'étudiant en master de Buchli, Johannes Pfleging, a équipé des répliques d'outils en pierre de capteurs. Et comme Iovita à l'époque de ses études, Pfleging a gratté des peaux d'animaux avec ces outils, à la différence près qu'il a fait enregistrer les mouvements et l'utilisation de la force par l'ordinateur. Il a ainsi prouvé que les capteurs permettent de collecter des données importantes pour la reproductibilité et la comparaison ultérieures des expériences. L'analyse des traces d'utilisation n'en reste pas moins coûteuse.
Un heureux hasard a voulu que ce soit précisément à ce moment-là que l'entreprise Kuka a mis au concours un prix de l'innovation et mis à disposition des robots légers avec commande de force pour des projets de recherche innovants. Ces robots se caractérisent par le fait qu'ils sont très légers par rapport au poids de leur charge et qu'ils peuvent adapter en quelques millisecondes les forces utilisées à la résistance expérimentée.
Un bras robotisé pour une analyse entièrement automatisée
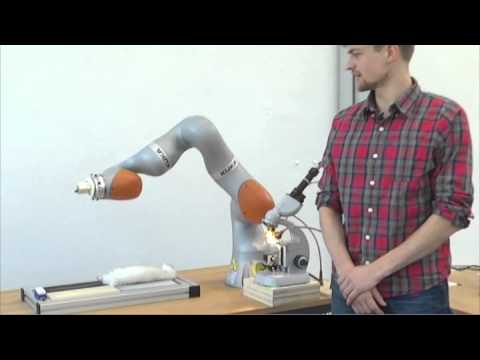
Depuis décembre dernier, un tel robot Kuka se trouve dans le laboratoire de Buchli. Pfleging, devenu entre-temps doctorant, a vissé le bras robotique gris à sept degrés de liberté sur une table en bois. Au bout du bras se trouve un support en plastique avec un morceau de bois dans lequel il a collé une réplique d'un outil en pierre. Dès que Pfleging lance un programme informatique qu'il a lui-même écrit, le bras commence à gratter tout seul avec la pierre sur un morceau de cuir fixé sur la table. Après quelques passages, il se plie et amène le morceau sous un microscope posé à côté de lui sur la table. Sur l'ordinateur de Pfleging apparaît alors l'image de la pierre, agrandie 80 fois, sur laquelle on peut découvrir de fines traces d'abrasion.
"Avec un tel système, nous pouvons non seulement automatiser la fastidieuse confection des traces d'usure, mais aussi l'analyse de la réplique travaillée", explique Buchli. Plusieurs robots pourraient gratter 24 heures sur 24 des répliques d'outils sur du cuir, de la pierre ou du bois et passer l'outil sous le microscope, par exemple après chaque 50e choc, pour prendre des photos de la surface. Cela permettrait, en combinaison avec les données sur les mouvements et les forces exercées par le bras robotisé, de reconstruire plus tard avec précision comment certaines abrasions se sont produites. "Avec de telles données d'analyse, nous pourrions à l'avenir créer d'énormes bases de données contenant toutes les caractéristiques des informations archéologiques pertinentes sur les matériaux et leurs phénomènes d'usure", explique Buchli.
Aperçu approfondi des cultures protohistoriques
De telles possibilités de comparaison élargies ont le potentiel d'accélérer la production de connaissances en archéologie et en paléoanthropologie. En cas de découverte d'un outil intéressant, les chercheurs pourraient comparer une image au microscope avec des milliers de données issues d'expériences d'usure réalisées dans le monde entier et en déduire l'utilisation passée de l'outil.
"Jusqu'à présent, en archéologie, nous nous sommes surtout intéressés à la morphologie des objets", raconte Iovita. "Mais ce n'est que lorsque nous connaissons l'utilisation des outils que nous pouvons en déduire la forme de culture qui y est associée". En outre, on part aujourd'hui du principe que l'utilisation d'outils et les capacités cognitives nécessaires à cette utilisation permettent de comprendre le développement évolutif précoce de l'homme. Pour la période comprise entre 3 millions et 50 000 ans avant le présent, les scientifiques sont encore dans le noir en ce qui concerne l'utilisation des outils de l'époque.
Changement de paradigme en cours
Actuellement, Iovita subit encore relativement beaucoup de vents contraires de la part de sa propre corporation. Les uns ne jurent que par le fait que les expériences réalisées manuellement sont plus proches des réalités d'autrefois, d'autres trouvent que l'analyse des traces d'utilisation ne fait généralement pas avancer la théorisation archéologique. Pour Iovita, cela s'explique surtout par le fait que la plupart des archéologues ont une formation en sciences humaines et ne connaissent pas le monde des ingénieurs. "Actuellement, on assiste toutefois à un changement de génération et de paradigme", estime-t-il. "L'intérêt pour l'analyse automatisée grandit et de plus en plus d'archéologues ont accès à la technologie correspondante".
Iovita dépose actuellement une demande pour la création d'un laboratoire de traces au centre de recherche de Neuwied, où les premières analyses de traces d'utilisation seront effectuées par des robots d'ici deux à trois ans. Buchli et Pfleging viennent de présenter leur système robotique à des experts dans le cadre du Kuka Innovation Award lors du salon industriel de Hanovre. Leur prochaine étape consistera à développer dans leur laboratoire un prototype de robot mieux adapté à une utilisation archéologique, tout en étant moins cher que les robots légers courants à commande de force. "Dans dix ans, les analyses robotisées devraient être la norme en archéologie", telle est la vision de Buchli. "Pour la première fois, les résultats de recherche seraient alors vraiment comparables, parce que la méthodologie derrière est standardisée et que les appareils sont calibrés pour cela".