La haute technologie dans les puits
Le robot "ANYmal", développé à l'ETH, peut voir, entendre ou ouvrir des portes. Des chercheurs de plusieurs pays travaillent désormais à ce que le robot fonctionne également dans des conditions extrêmes. La mission les conduit notamment dans le sous-sol de Zurich.

Deux hommes soulèvent la machine high-tech de 30 kilos et la font descendre au bout d'un câble dans l'obscurité du puits. Nous enfilons des combinaisons intégrales réfléchissantes, troquons nos chaussures contre une paire de bottes en caoutchouc de la longueur d'une cuisse, les nouons aux œillets de la combinaison, à quoi s'ajoutent un casque, une lampe de poche et des gants jetables, puis nous descendons à leur suite - le long des marches dans la paroi, l'une après l'autre, à quatre mètres de profondeur dans les égouts de Zurich.
En cette chaude journée d'automne, un groupe de chercheurs teste si le robot Anymal, développé par le Robotic Systems Lab et le spin-off de l'ETH "ANYbotics", pourra un jour être utilisé dans les égouts. Il pourrait à l'avenir soulager les collaborateurs de la ville de Zurich qui marchent ou rampent régulièrement dans les quelque 100 kilomètres de regards accessibles de la ville pour vérifier si le sol et les murs sont endommagés - un travail non seulement malsain, mais aussi dangereux. Les puits peuvent ainsi se remplir d'eau en très peu de temps. De plus, le robot pourrait opérer dans des canalisations qui ne sont pas du tout accessibles avec la technologie actuelle.
Premier essai
Le robot que les chercheurs sont en train de mettre en place dans les profondeurs du puits mesure environ un demi-mètre et possède, outre quatre jambes articulées, une sorte de tête composée d'une caméra ainsi que de différents capteurs. La machine est construite de manière modulaire et peut être mise à niveau en fonction de l'application.


Peter Fankhauser, cofondateur du spin-off de l'ETH qui commercialise Anymal, transmet par radio à ses collègues qui coordonnent l'action depuis la surface et donnent des ordres au robot. Il actionne ensuite un joy-stick et le robot avance à pas de loup. Comme il s'agit de la première course en terrain inconnu, il dirige partiellement le robot, même si celui-ci peut aussi se déplacer de manière autonome. "C'est une mesure de sécurité. Si cela fonctionne en laboratoire, cela ne signifie pas toujours que cela fonctionnera dans la réalité", explique Fankhauser. En effet, le robot doit fonctionner ici dans des conditions complètement différentes : Le canal mouillé est glissant, la température est plus basse et l'humidité de l'air plus élevée qu'en laboratoire. Et il fait sombre.
"Ici, c'est partout pareil", dit Fankhauser, presque d'une voix résignée, alors que le robot avance à pas lents le long du canal d'environ trois mètres de haut et cinq mètres de large. Le bruit électromécanique régulier - une sorte de tintement rythmique - se mêle alors au bruissement des eaux usées qui nous parviennent du canal principal tout proche. Nous nous trouvons dans un canal de réserve bien aménagé, dans lequel ne s'écoule pour l'instant qu'un petit filet d'eau - là encore, une mesure de précaution pour le tout premier test pratique avec le robot à quatre mètres de profondeur.
Toucher dans le noir
Le projet de recherche appelé THING (subTerranean Haptic InvestiGator), prévu pour une durée de trois ans, vise à ce que les robots puissent mieux percevoir leur environnement et soient capables de s'y déplacer de manière autonome. En règle générale, les robots s'orientent à l'aide de caméras 3D et de capteurs laser, mais ceux-ci sont vulnérables aux conditions difficiles, comme l'eau au sol ou la poussière dans l'air. C'est pourquoi les chercheurs voient la solution dans l'amélioration de la perception haptique, c'est-à-dire l'orientation par le sens du toucher.
Pour ce projet, des chercheurs de l'ETH se sont associés à des collègues d'Édimbourg, de Pise, d'Oxford et de Poznan. Toutes les hautes écoles font de la recherche avec un robot Anymal et on se rencontre régulièrement. Outre les tests dans les égouts, d'autres sont prévus l'année prochaine dans une mine de cuivre polonaise, où le robot doit fonctionner dans un climat totalement différent - dans un air poussiéreux et chaud sur un sol caillouteux. Du côté de l'ETH, c'est le laboratoire des systèmes robotiques qui est représenté, sous la direction du professeur Marco Hutter, dont les années de recherche sur les robots marcheurs ont été encouragées très tôt par l'ETH - par une bourse ESOP ainsi que par une Pioneer Fellowship.
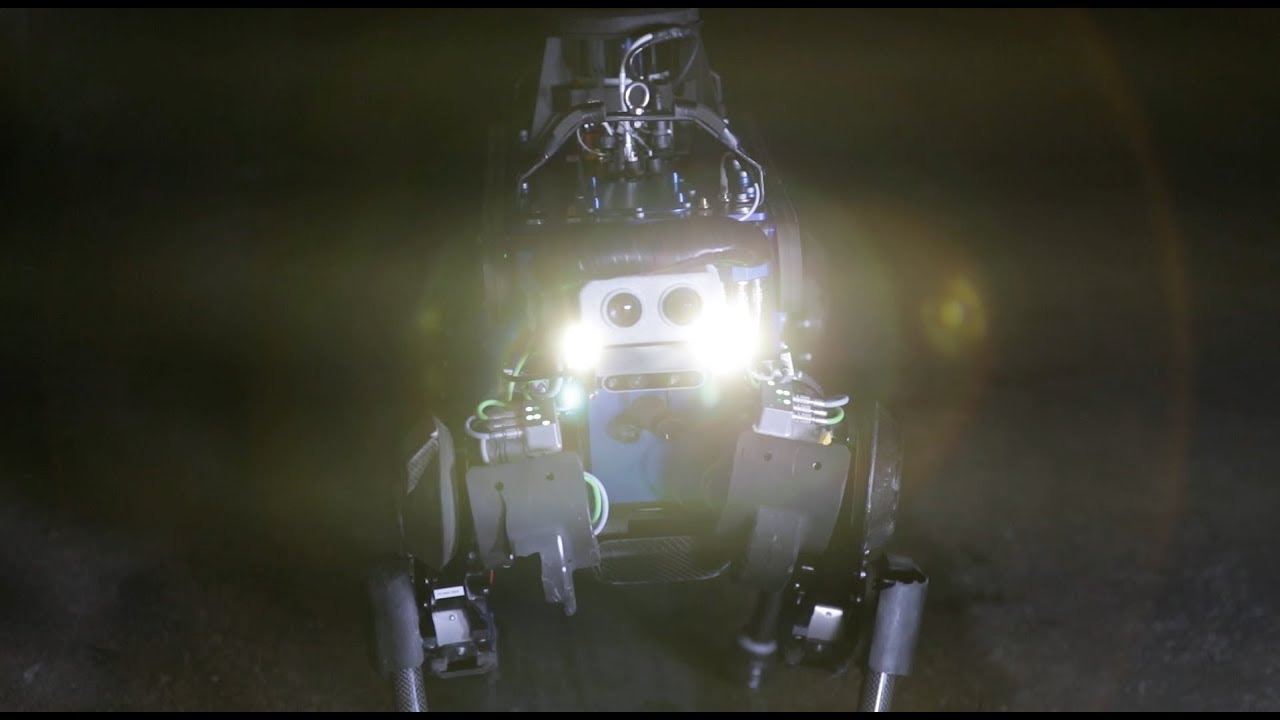
Lors de cette première journée de test, l'une des questions les plus importantes est de savoir si le robot est capable de s'orienter dans l'obscurité des égouts. Au début, deux sponsors portent de grandes lampes LED pour nous permettre à tous de bien voir. Ensuite, Fankhauser ordonne d'éteindre la lumière externe et demande par radio au robot d'utiliser sa propre lumière. Dans l'obscurité, le sens du toucher aide, mais pas seulement. "Le robot scanne son environnement à l'aide de capteurs laser et de caméras et doit reconnaître l'endroit où il se trouve à l'aide des irrégularités du béton", explique Hutter.
Il ne reste plus alors que les petites lumières rondes à LED sur la "tête" du robot. L'ambiance de fin du monde est maintenant parfaite : l'obscurité, le bruit de l'eau, le tintement électromécanique, les yeux du robot. "Comme un rottweiler", dit l'un d'eux, brisant ainsi le silence momentanément angoissant.
Sous le jour et au large

Depuis 2009 déjà, des recherches sont menées à l'ETH sur des robots à quatre pattes. Le prototype d'Anymal a vu le jour en 2015, et un an plus tard, le spin-off Anybotics a été créé, avec pour objectif de rendre les robots opérationnels sur tous les terrains - une condition préalable à de nombreux domaines d'application possibles dans la pratique. "Let Robots Go Anywhere", tel est le slogan de l'entreprise. Deux à trois fois par mois, on se déplace pour effectuer des tests. Ainsi, Fankhauser et une partie de son équipe se sont récemment rendus sur une plate-forme offshore située au milieu de la mer du Nord. Lors de l'installation pilote, Anymal a déjà effectué plusieurs trajets d'inspection de manière autonome.
Après presque dix ans de recherche, Anymal est capable de beaucoup de choses : non seulement il se déplace de manière autonome, mais il est également doté de plusieurs sens : il peut voir, entendre ou sentir. Ainsi, le robot peut par exemple lire l'indicateur de pression d'air d'une machine, classer des bruits ou encore reconnaître des objets - par exemple pour vérifier si l'extincteur est au bon endroit. Il est également capable d'effectuer lui-même certaines manipulations : À l'aide d'un bras préhenseur supplémentaire, il peut ouvrir une porte, évacuer des déchets ou appuyer sur un bouton d'ascenseur. Il fournit en outre des données qui, à bien des égards, sont plus précises que celles fournies par nos yeux, nos oreilles ou notre nez : par exemple pour la température, les gaz dans l'air ou, depuis peu, pour la nature du sol. "Il a donc des capacités surhumaines", explique Fankhauser.
Malgré le manque de lumière, le robot semble bien s'en sortir au fond de la canalisation. Il avance tranquillement dans le ruisseau. Au niveau d'un ressaut d'une vingtaine de centimètres dans un canal secondaire lui aussi relativement sec, Fankhauser stoppe la machine high-tech avec son joystick. Il hésite d'abord à donner l'ordre au robot de passer par-dessus - là encore, une manœuvre qui ne poserait aucun problème en laboratoire, mais qui est ici liée à des risques. "Il y a aussi beaucoup d'argent en jeu", dit Fankhauser. Il tente tout de même l'expérience. Au premier essai, Anymal ne réussit pas la tâche, il s'arrête avant le talon, aussi cabré qu'un cheval. "Default, start again", dit Fankhauser par radio. Le robot pose maintenant élégamment un pied après l'autre par-dessus le bord.
Un grand flux de données
Pendant que le robot continue à patrouiller un peu plus loin en présence de Fankhauser et de Hutter, je retourne à l'ouverture du puits et monte à l'étage où, sous une tente blanche, deux assistants de l'ETH sont assis sur un banc fixe, les yeux rivés sur leur ordinateur portable.
Un générateur électrique vrombit, un routeur clignote, et depuis la route de passage, plus d'un cycliste regarde avec étonnement ce qui se passe autour du couvercle de puits ouvert au bord de la route. Par-dessus les épaules des chercheurs, je vois un flux de données presque incessant s'écouler sur l'écran. Grâce à la technologie 3D et laser la plus moderne, des images en direct du robot dans le sous-sol sont visibles sur un écran externe.
Lorsque Fankhauser transmet par radio vers le haut que le robot doit toucher la paroi du canal avec un pied, les collaborateurs de l'ETH sont mis à contribution. En effet, le logiciel utilisé n'est pas préprogrammé pour cela. Ils utilisent sans hésiter un algorithme qui avait été programmé à l'origine pour apprendre à Anymal à serrer la main. Pour que le robot ne heurte pas le mur de plein fouet, les chercheurs doivent adapter les paramètres - il s'agit en l'occurrence de l'angle avec lequel le robot doit lever la jambe. "100", tape l'un des collaborateurs, puis il augmente la valeur en continu. A 180, cela convient parfaitement, la manœuvre fonctionne.
Fankhauser et Hutter quittent à leur tour les égouts frais et humides pour le chaud soleil d'automne. Leurs traits se détendent alors qu'ils se débarrassent de leurs survêtements lumineux. "Le robot a été utilisé non-stop et a collecté beaucoup de données", dit Fankhauser en détachant ses longues bottes en caoutchouc et en se libérant de sa combinaison. Le professeur Hutter est lui aussi satisfait. "Toutes les équipes repartent avec un grand ensemble de données qui nous permettra de poursuivre nos recherches". Un pas de plus a été franchi vers l'objectif de faire fonctionner le robot dans des conditions exigeantes sous terre. Mais le travail n'est pas encore terminé, bien au contraire : ce jour-là, le robot a enregistré environ 500 000 mesures par seconde. "Cela suffit pour six mois de travail", dit Fankhauser en riant.