Lost and found in one millisecond
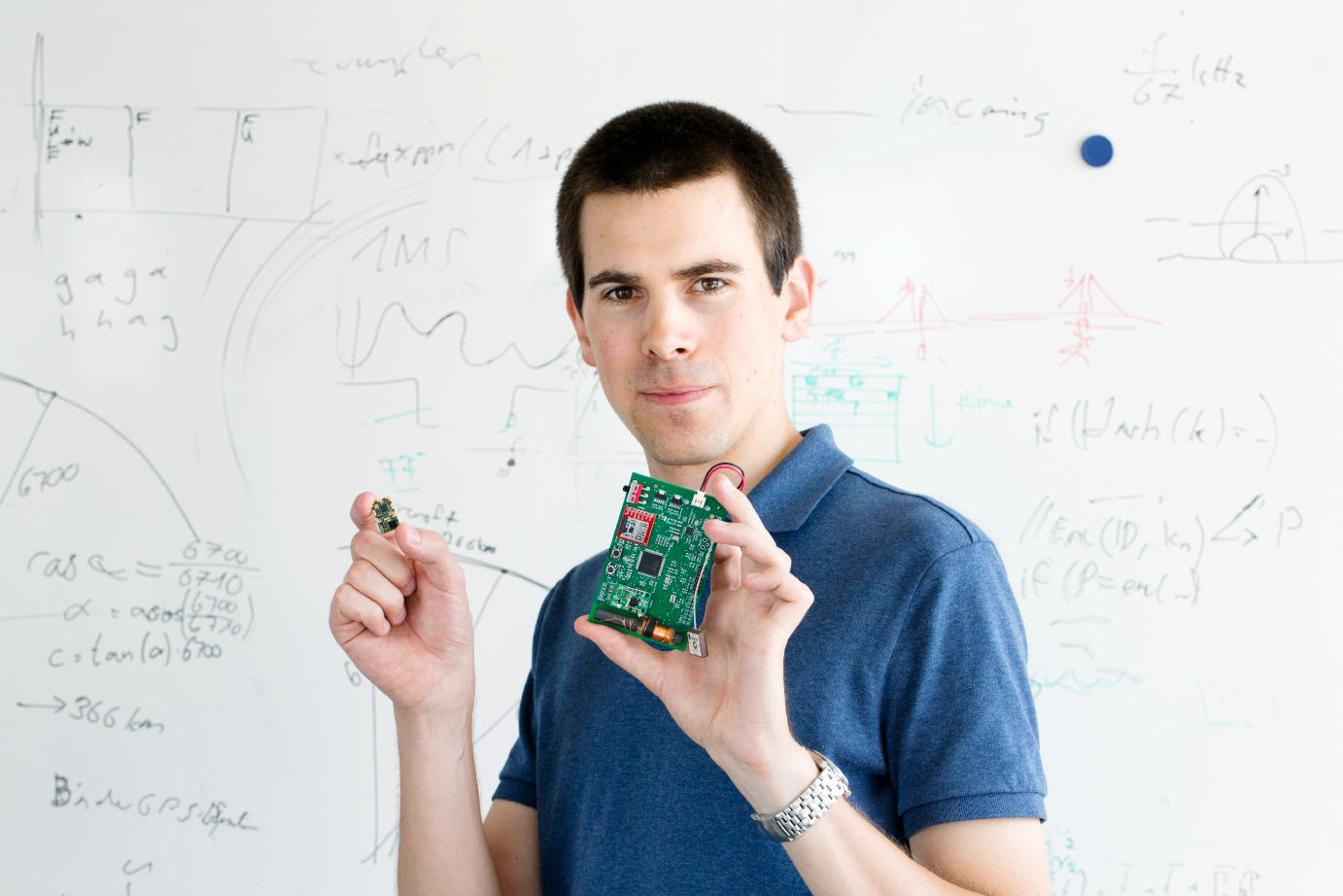
Forgot where you left your bag? Can’t find your cat? Wondering what distance you just ran? This miniature GPS receiver from ETH Zurich may give the answer. Read the interview with the inventor Manuel Eichelberger.
GPS receivers are pretty common in cars, where we use the navigation system to find our way in a new town. Why doesn’t my watch have GPS yet?
The short answer is energy consumption. The GPS system has to receive and compute a certain set of information before it can give a first fix on the position. You may have experienced the situation yourself, when you start your car, draw out of your parking spot, and there is still no help from the GPS on how to get out of the city. The GPS receiver has to wait up to 6 seconds for time-stamps from the satellites and up to 30 seconds for the satellite coordinates. Only then, it can decode the GPS signal into geographic coordinates. This delay is not only annoying, it also consumes a lot of energy. A small battery wouldn’t last long. Therefore, it is quite challenging to have a mobile device equipped with GPS.
So what is different about your GPS receiver?
We found a method, which allows us to get a first fix on the position with just one millisecond of satellite data! Here is how we do it: We switch the GPS receiver on and off for a split second. It records the carrier waves from all available satellites. The time differences with which these signals arrive can be used to determine the receiver position. Due to measurement noise, it is not always possible to determine the exact time of arrival, so we calculate a likelihood function of the position, which can be used to get a better estimate of the actual position.
After all, you need a time-stamp and satellite coordinates for identifying the exact receiver location?
Yes, we do, but we take the information from different sources. We take the time-stamp from the GPS receiver itself, which is precise enough when using the likelihood calculation, and we download the satellite trajectories from NASA’s archive of space geodesy data. With this additional information we can narrow down the first fix to 20 m and consecutive fixes to 6 m.

Can you tell us about some typical applications?
Our device is best used for tracking. For example, one could easily add a location stamp to a photo. When the camera takes a picture, the GPS receiver is activated and a one-millisecond data package with time-stamp gets attached to the image. Later, when the photo is downloaded to a computer, the GPS data is decoded. If the location data is needed immediately, let’s say for tracking a pet, the one millisecond data-package with time-stamp needs to be transmitted via a local network to the pet owner. If you carry the GPS receiver yourself and wonder about your location, the best solution may be cloud computing. The GPS data can be sent to a cloud service and the user receives back the decoded geographic coordinates. We are currently looking into the option of adding a network chip to our GPS receiver while keeping the overall system small, light and low in energy consumption.
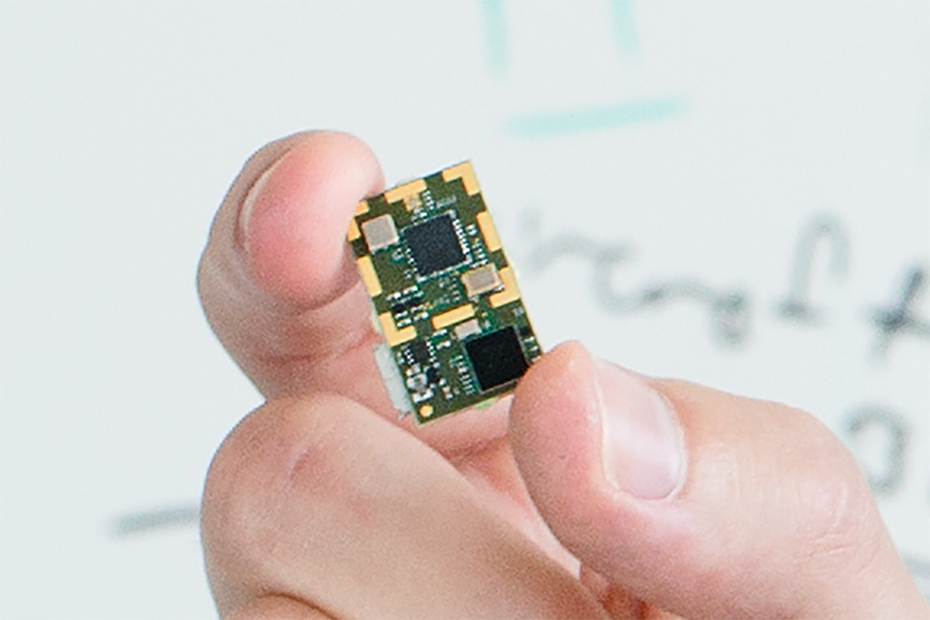
How big is your GPS receiver?
Our current model weighs 1.3 grams without a battery, which is somewhat more than the weight of a Swiss banknote. This is a great improvement from the first model, which was about two orders of magnitude bigger.
The miniaturization process is mainly driven by improvements to the software. For example, when we realized that our internal clock was precise enough for the likelihood calculation we got rid of the antenna for the separate time signal receiver, which is quite a large piece of equipment and also a big energy consumer. As a computer scientist, I am very motivated to improve the code even further. It may be possible to reduce the bit rate with which we sample the GPS signal, thus making the one-millisecond data package smaller. In addition, we may want to protect our device against fake GPS signals, thus making it hacker-proof. It would be nice to continue our research in collaboration with an experienced industrial partner and connect our receiver to the upcoming low-power LTE cellular network to drive our invention towards a market-ready product.
Contact/Links:
Manuel Eichelberger, Computational Engineering & Networks Laboratory
DownloadGPS_Product_Brief (PDF, 105 KB)
Do you want to subscribe to ETH News for Industry?
external pageSubscribe to our newsletter
Are you looking for research partners at ETH Zurich?
Contact ETH Industry Relations