Flieg, Mikromaschinenvogel, flieg!
Forschende der ETH Zürich und des Paul Scherrer Instituts PSI haben eine Mikromaschine in Form eines Vogels entwickelt. Dank magnetisch programmierter Nanomagnete kann dieser Mikroroboter in einem Magnetfeld verschiedene Manöver «fliegen» - und vielleicht dereinst im menschlichen Körper kleine Operationen durchführen.
Er misst nur wenige Mikrometer (wenige millionstel Meter) und erinnert an einen Origamivogel. Doch anders als die Faltkunstgebilde aus Papier bewegt sich dieser Roboter wie von Geisterhand, ohne dass eine sichtbare Kraft auf ihn einwirkt. Er schlägt mit den Flügeln, krümmt seinen Hals und zieht seinen Kopf ein. Möglich sind diese Aktionen durch Magnetismus.
Forschende des Paul Scherrer Instituts PSI und der ETH Zürich haben die Mikromaschine unter anderem aus Materialien zusammengesetzt, die kleine Nanomagnete enthalten. Die Wissenschaftler unter der Leitung von Laura Heyderman, die das gemeinsame Institut für Mesoskopische Systeme führt, haben diese Nanomagnete so programmiert, dass sie eine bestimmte magnetische Ausrichtung annehmen. Wenn die programmierten Nanomagnete dann einem Magnetfeld ausgesetzt werden, wirken spezifische Kräfte auf sie.
Befinden sich diese Magnete in den flexiblen Bauteilen des Origamivogels, dann führen die auf sie wirkenden Kräfte zu einer Bewegung. Die Nanomagnete lassen sich immer wieder neu programmieren. Das führt zu jeweils unterschiedlichen Kräften, die auf die Konstruktion wirken, und neuen Bewegungen. Ihre Ergebnisse veröffentlichen die Forschenden soeben im Wissenschaftsmagazin «Nature».
Nanomagnete programmieren
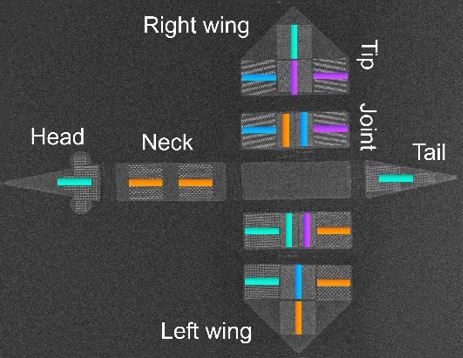
Für den Bau des Mikroroboters platzierten die Forschenden Reihen von Kobaltmagneten auf dünnen Schichten von Siliziumnitrid. Der Vogel aus diesem Material konnte verschiedene Bewegungen ausführen, beispielsweise flattern, rütteln, sich umdrehen oder zur Seite gleiten.
«Diese Bewegungen des Mikroroboters spielen sich im Bereich von Millisekunden ab», sagt Heyderman. «Das Programmieren der Nanomagnete geschieht dagegen innerhalb weniger Nanosekunden.» Das ermöglicht es, unterschiedliche Bewegungen zu programmieren. Bezogen auf das Modell des Mikrovogels bedeutet das, dass man ihn beispielsweise zunächst flattern, anschliessend zur Seite gleiten und dann wieder flattern lassen kann. «Wenn nötig, könnte man ihn dazwischen auch mal rütteln lassen», sagt Heyderman.
Intelligente Mikroroboter
Dieses neuartige Konzept ist ein wichtiger Schritt auf dem Weg zu Mikro- und Nanorobotern, die nicht nur Informationen für eine einzelne bestimmte Aktion speichern, sondern immer wieder neu programmiert werden können, um verschiedene Aufgaben zu erfüllen. «Es ist vorstellbar, dass in der Zukunft eine autonome Mikromaschine durch menschliche Blutgefässe navigiert und biomedizinische Aufgaben wie das Abtöten von Krebszellen übernimmt», erklärt Bradley Nelson, Leiter des Instituts für Robotik und Intelligente Systeme der ETH Zürich, dessen Labor Knowhow beisteuerte. Denkbar seien auch Einsatzgebiete wie flexible Mikroelektronik oder Mikrolinsen, die ihre optischen Eigenschaften verändern.
Darüber hinaus sind Anwendungen möglich, bei denen sich die Eigenarten von Oberflächen verändern. «Beispielsweise könnten damit Oberflächen geschaffen werden, die je nach Bedarf entweder von Wasser benetzt werden können oder Wasser abweisen», sagt Jizhai Cui, Ingenieur und Forscher im Labor für Mesoskopische Systeme von Laura Heyderman am PSI.
Dieser Text beruht auf einer externe Seite Medienmitteilung des Paul Scherrer Institut PSI.
Literaturhinweis
Cui J, Huang T-Y, Luo Z, Testa P, Gu H, Chen X-Z, Nelson BJ, Heyderman LJ. Nanomagnetic Encoding of Shape-morphing Micromachines. Nature, published online Nov 11, 2019. DOI: externe Seite 10.1038/s41586-019-1713-2