Styroporschnitt mit Schwung
Der Werkstoff Styropor fasziniert mit seinen vielen Einsatzmöglichkeiten. Komplexe, kurvenreiche Formen lassen sich jedoch schwer mit herkömmlichen Schneidwerkzeugen herstellen. Hierfür schickt Simon Dünser einen Roboter an die Arbeit, der effizient und präzise einen heissen Draht schwingt.
Was ist neu an Eurer Art des Styropor Schneidens?
Typischerweise wird Styropor mit einem heissen Draht geschnitten. Der Draht ist dabei in einer Vorrichtung straff eingespannt und formt eine gerade Linie. Damit lassen sich schnell und einfach ebene Flächen schneiden oder Flächen, die nur in einer Raumrichtung gekrümmt sind. Kugelförmige Formen sind schwierig, schüsselförmige Formen gar unmöglich herzustellen.


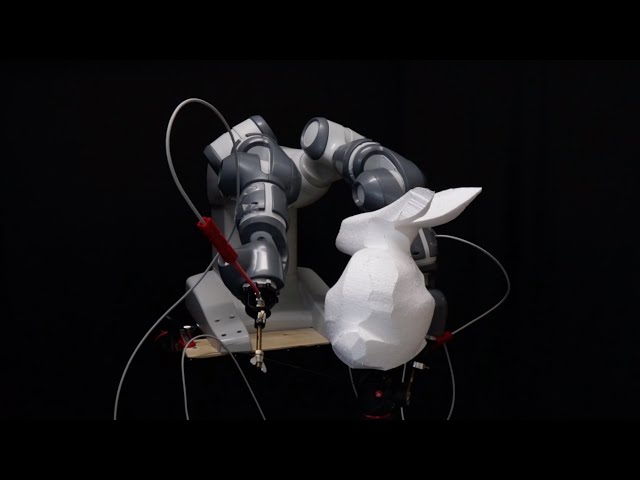
Bei uns zieht ein zweiarmiger Roboter einen geschwungenen Draht durch den Styroporblock. Der Roboter spannt, verbiegt und verdreht den Draht noch während des Schneidevorgangs. So lassen sich Oberflächen mit unterschiedlichen Wölbungen effizient realisieren. Die Figur des Kaninchens wurde mit nur zehn Schnitten erzeugt.

Wer steuert den Roboter?
Der Roboter arbeitet weitestgehend autonom. Er plant und optimiert seine Schnitte. Dabei kann der Roboter den Draht weder sehen noch fühlen. Wir haben einen Algorithmus entwickelt, der dem realen Draht und dem realen Styroporblock einen virtuellen Doppelgänger gibt. Der Roboter plant seine Arbeitsschritte in dieser virtuellen Welt und achtet auch darauf, dass der Draht nicht reisst oder das Kaninchen vom Sockel gestossen wird.

Was sind die Herausforderungen?
Das Resultat, also die fertig geschnittene Figur, ist nur so gut wie unsere Abbildung der Realität im virtuellen Arbeitsraum des Roboters. Es gibt dabei viele eng aneinander gekoppelte Teilprobleme, die zeitgleich gelöst werden müssen. Wie biegt sich der Draht? Welche Bewegungen können die Roboterarme kollisionsfrei ausführen? Was sind die besten Schnitte, um die vorgegebene Geometrie im Styropor zu verwirklichen? Dies führte zu einem sehr komplexen Optimierungsproblem, das es zu lösen galt. Damit ein normaler Computer nicht ewig rechnet, mussten wir dafür noch eine effiziente Methode finden. Unser Algorithmus braucht 4 Minuten für einfache Formen und bis zu 4 Stunden für komplexe Formen. Das Kaninchen liegt mit gut 2 Stunden Rechenzeit im Mittelfeld.
Was war so eine typische Falle, in die Ihr getappt seid?
Einer der ersten Fehler lag in der Simulation der Materialeigenschaften des Drahtes. Anhand von Materialdaten lässt sich abschätzen, wie stark sich ein Draht verbiegen lässt, ohne Schaden zu nehmen. Wir haben die Herstellerdaten übernommen und ausser Acht gelassen, dass wir nicht bei Raumtemperatur arbeiten, sondern den Draht für den Schneidevorgang erhitzen. Ein heisser Draht verliert seine Elastizität schon bei wesentlich tieferer Krafteinwirkung und verändert beim Biegen dauerhaft seine Grundform. Der reelle Draht schnitt somit eine andere Fläche als der berechnete Draht im virtuellen Raum. Das Ergebnis war dann kein Kaninchen. Nach diesen Kinderkrankheiten erwies sich der Prozess dann aber als erstaunlich robust.
Wie kam es zur Patentanmeldung?
In der Forschungsgruppe von Prof. Coros arbeiten wir sehr anwendungsorientiert. Das übergeordnete Ziel ist, den Robotern die physikalische Welt verständlich zu machen, so dass sie sich besser in unserer Welt zurechtfinden und wertvolle Arbeit leisten können. Im konkreten Fall sehen wir kommerzielles Potential beim Styroporschnitt, was eine Patentanmeldung nahelegte. Der Roboter erleichtert die Herstellung von Skulpturen oder Prototypen. Die Styroporobjekte finden Anwendung als Elemente des Bühnenbilds, als Wärmeisolatoren im Anlagenbetrieb oder als Schalung beim Betongiessen. Wer Interesse an dieser Erfindung hat, darf sich gern bei uns melden.

Kontakt/Links:
Prof. Stelian Coros, Institute for Intelligent Interactive Systems
Publikation: “externe Seite RoboCut: Hot-wire Cutting with Robot-controlled Flexible Rods.”, ACM Trans. Graph. 39, 4, Article 98 (July 2020)
Zum Patent angemeldet (bitte kontaktieren Sie ETH transfer für weitere Informationen)
Sind Sie interessiert an weiteren spannenden "News for Industry" Storys?
externe Seite Abonnieren Sie unseren Newsletter
externe Seite Folgen Sie uns auf LinkedIn
Suchen Sie Forschungspartner an der ETH Zürich?
Kontaktieren Sie ETH Industry Relations
Kommentare