Anpassungsfähiger Roboter
ETH-Forscher haben einen Roboter entwickelt, der Temperatur und Elastizität von Objekten bestimmen kann – und sich dabei selbstständig auf verschiedene Messbereiche einstellt.
«Unsere Vision sind Roboter, die mit unbekannten Objekten und Umgebungen klarkommen und sich je nachdem sogar selbstständig reparieren können», erklärt Fumiya Iida, Professor für Bio-Inspired Robotics am Institute of Robotics and Intelligent Systems. Im Gegensatz zu heutigen Robotern, die in der Regel nur bekannte Aufgaben ausführen können, wären solche intelligenten Maschinen in der Lage, komplexe Herausforderungen zu bewältigen – zum Beispiel auf einer Marsmission oder bei Aufräumaktionen an Orten wie Fukushima.
Um sich auf Unvorhersehbares einzustellen, müssen auch Maschinen ihre Umgebung aktiv wahrnehmen und sich an sie anpassen können. Dass das für Roboter prinzipiell möglich ist, zeigt Iidas Gruppe in ihrer kürzlich im PLoS One erschienenen Publikation. Sie stellen darin einen Roboter vor, der selbstständig Temperatur und Elastizität von unbekannten Objekten untersuchen kann – mit Werkzeugen, die er vor Ort autonom und in variabler Ausführung herstellt.
Roboter baut Messwerkzeug aus Heissleim
Der Roboter, den die Forscher entwickelt haben, arbeitet im Wesentlichen mit einer Kamera, einem mathematischen Algorithmus und einem eingebauten 3D-Drucker, der Heissleim verwendet, wie ihn Bastler und Heimwerker kennen. Drucker und Kamera sind an einem Metallgehäuse befestigt, das sich wie ein Kopf mit Hilfe eines Roboterarms in jede beliebige Richtung bewegen kann.
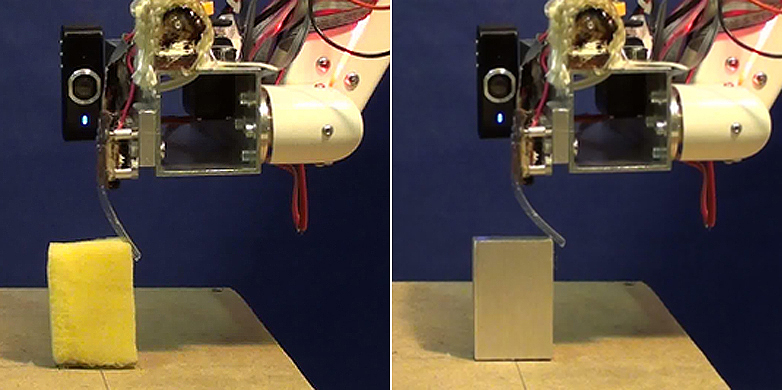
Um die Elastizität eines unbekannten Objektes zu untersuchen, stellt der Roboter selbstständig verschieden dicke Stäbchen aus Heissleim her. Die fertigen Stäbchen nimmt er auf und drückt sie von der Seite her an das zu untersuchende Objekt. Die Kamera macht Bilder von der Krümmung des Stäbchens. Die Software wertet die Bilder aus und bestimmt daraus die Elastizität des Untersuchungsobjektes.
Genauigkeit in verschiedenen Messbereichen
Die Messmethode erscheint zwar auf den ersten Blick recht kompliziert und wenig praktisch. Auch liefert der Roboter bisher keine allzu genauen Werte. Doch das Prinzip ist clever: Dadurch, dass der Roboter Stäbchen mit unterschiedlicher Dicke verwendet – im Prinzip unterschiedlich empfindliche Tastinstrumente – und sich dadurch an verschiedene Objekte individuell anpassen kann, kann er die Elastizität eines Schwammes ebenso genau messen, wie die eines Aluminiumklotzes. Das Problem von herkömmlichen Messinstrumenten – dass präzise Messungen und ein grosser Messbereich nicht gleichzeitig realisierbar sind – hat der Roboter deshalb nicht.
Ebenso flexibel, wie er die Elastizität bestimmt, misst derselbe Roboter auch die Temperatur von verschiedenen Objekten. Dafür stellt er zylinderförmige Heissleim-Klumpen als zusätzliches Werkzeug her, befestigt sie an seiner Kontaktfläche und hält sie an sein Untersuchungsobjekt, damit sich die Temperatur der Kontaktfläche diesem angleichen kann. Ab einer gewissen Temperatur ändern sich die Eigenschaften des Heissleims. Wird er an der Kontaktstelle flüssig, fällt der Heissleimzylinder ab und die Software bestimmt anhand des Zeitpunkts, zu dem dies geschieht, die Temperatur des zu untersuchten Objektes. Auch hier kann der Roboter die Messungen verfeinern, indem er die Grösse von Zylinder und Kontaktstelle variiert.
Die Natur als Vorbild für Maschinen
Für diesen Roboter gibt es zwar ausserhalb der Forschung keinerlei konkrete Anwendung. Das Ziel von Iidas Gruppe war denn auch ein anderes: zu zeigen, dass es prinzipiell möglich und machbar ist, «intelligente» Maschinen zu bauen, die ihre Umwelt aktiv untersuchen und die Gestalt ihrer Sensoren selbstständig anpassen können.
Nach diesem Erfolg will sich das Forschungsteam weitere Sinne wie Hören, Sehen oder Tasten vornehmen und dafür adaptive Sensoren entwickeln. Als Vorbild dient den Forschern dabei stets die Natur: «Wir versuchen, von der Natur zu lernen und unsere Maschinen mit ihren Ideen zu verbessern», erklärt Iida. «Auch die Sinnesorgane von Menschen und Tieren haben im Lauf der Evolution ihre Gestalt und Funktionsweise angepasst. Und unsere Augen und Ohren können sich zum Beispiel aktiv auf verschiedene Messbereiche einstellen.»
Bis es die anpassungsfähigen Sensoren mit natürlichen Sinnesorganen aufnehmen können und in realen unvorhersehbaren Situationen zum Einsatz kommen, wird es noch einige Zeit dauern. Im unbekannten Terrain übertreffen Menschen und Tiere die Maschinen bei weitem.
Literaturhinweis
Nurzaman SG, Culha U, Brodbeck L, Wang L, Iida F: Active Sensing System with In Situ Adjustable Sensor Morphology. PLoS ONE, 1 December 2013, 8(12): e84090. doi:externe Seite 10.1371/journal.pone.0084090
Kommentare
Noch keine Kommentare