Ein Pflück-Roboter mit Fingerspitzengefühl
Die Landwirtschaft ist sehr arbeitsintensiv und es wird immer schwieriger, Arbeitskräfte zu finden. Wäre es nicht praktisch, wenn ein Roboter die Arbeit erledigen könnte?

Der moderne Gemüsebau ist bereits stark industrialisiert. Dennoch ist nach wie vor viel Handarbeit erforderlich, was sich stark auf die jährlichen Kosten auswirkt. Angesichts des weitverbreiteten Personalmangels ist es nicht verwunderlich, dass das Interesse an der Automatisierung bestimmter Aufgaben gross ist. Salman Faraji vom Robotic Systems Lab (RSL) der ETH Zürich und sein Team haben einen Roboter entwickelt, der einen Teil der Arbeit übernimmt und sich leicht in bestehende Systeme einbinden lässt. Dem Roboter bei der Arbeit zuzusehen, ist fast schon meditativ: Der Arm streckt sich aus, steuert auf den Fruchtstiel zu, schneidet ihn ab und wirft die Tomatenrispe in die Box - und nochmals von vorne.

"Allein die Ernte macht 4 bis 6 % der gesamten Produktionskosten aus. Das Einsparungspotenzial ist also beträchtlich", sagt Toni Suter, Produktionsleiter bei Meiergemüse in Rütihof, Schweiz. Im Durchschnitt werden für die Ernte und das Entblättern eines Hektars pro Jahr insgesamt 2'815 Arbeitsstunden benötigt. Ein Roboter hingegen ist 4'246 Stunden pro Jahr im Einsatz, inklusive Nachtarbeit. Hochgerechnet schafft also ein einziger Pflückroboter die erforderliche Leistung für 1,5 Hektar, weshalb er 3,5 Arbeitnehmer ersetzen kann. Angesichts dieser Fakten ist es nicht verwunderlich, dass Salman nicht der erste war, der an die Automatisierung des Gemüsebaus dachte. Was unterscheidet Floating Robotics also von seinen Mitbewerbern?
Deep learning und ein cleveres System
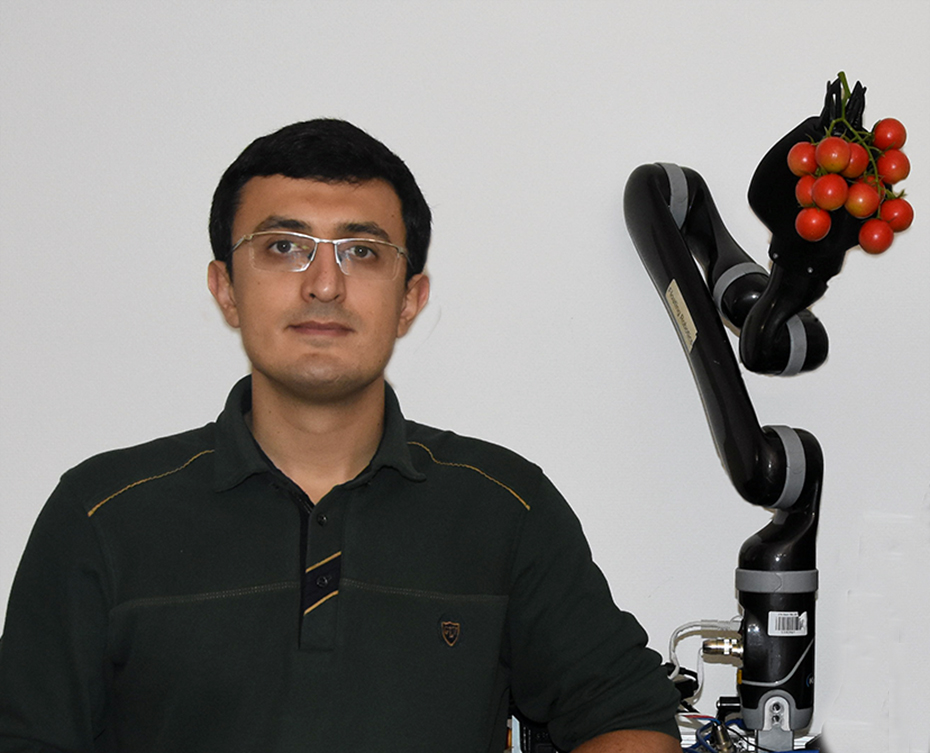
"Unser System kombiniert Robotik, Bildverarbeitung und fortschrittliche KI", sagt Salman. Der Roboter besteht aus einem Roboterarm mit Greifer und Schere, Kameras und hochmodernen Parallelverarbeitungsfunktionen. Der Arm kann auf einen vorhandenen Wartungswagen montiert werden, der in Gewächshäusern eingesetzt wird. Für die Ernte wird ein Kistensystem hinzugefügt.

Der Roboter ist darauf trainiert, den Reifegrad der Früchte (z. B. Kirschtomaten) mit Hilfe von Bildverarbeitung zu erkennen. Er identifiziert auch die Fruchtstiele der Rispe und die Blätter. Auf diese Weise kann der Roboter jede Reihe abfahren, die Fruchtstiele nahe am Pflanzenstamm pflücken und sie in die Erntekiste legen. Ebenso kann der Roboter die Reihen bearbeiten und die Tomatenpflanzen entlauben - das gleiche Prinzip, aber anders trainiert. "Es klingt einfach, aber hinter der Technologie stecken zwei Jahre intensive Forschung und Programmierung an der ETH. Die grösste Herausforderung war es, dem Roboter beizubringen, dünne Objekte richtig zu erkennen", erklärt Salman. "Wir arbeiten schliesslich mit Pflanzen, und Pflanzen sind nicht identisch, was das Training des Roboters umso schwieriger macht." Nichtsdestotrotz hat Floating Robotics das Ziel, Tomaten mit einer Genauigkeit von 95% zu pflücken.


Es gibt Konkurrenten auf dem Markt, aber keiner von ihnen bietet so viel Flexibilität wie Floating Robotics. Einige Geräte können lediglich entlauben und andere nur einzelne Tomaten oder Fruchtstiele ernten. Ausserdem sind sie nicht mit der bestehenden Gewächshausinfrastruktur kompatibel und erfordern daher zusätzliche Investitionen.
Erfolgreiches Pilotprojekt
Im Jahr 2022 haben Salman und sein Team mit Unterstützung der Innosuisse ihren ersten Prototyp bei Meiergemüse in Betrieb genommen. In diesem Jahr wird Floating Robotics einen zweiten Pilotversuch bei Beerstecher in der Nähe von Zürich durchführen. Bianca Curcio, Leiterin des Gewächshauses bei Beerstecher, sagt: "Wir haben Floating Robotics letztes Jahr kennengelernt und waren beeindruckt, wie gut der Roboter das Pflücken und Entlauben beherrscht. Wir sind zuversichtlich, dass der Pilotversuch zeigen wird, wie ein automatisierter Roboter am besten in das aktuelle Erntemanagement integriert werden kann und unter welchen Bedingungen er ein nützliches Werkzeug für Gewächshausbetreiber sein kann, um das ganze Jahr über gesunde Produkte zu gewährleisten."
Herausforderungen und Ausblick
Auch wenn es noch einige Hürden zu nehmen gilt, will Floating Robotics in Zukunft noch mehr bieten. Während das Ernten und das Verpacken im Jahr 2023 optimiert werden sollen, plant das Unternehmen für 2024 die Integration von Reihenwechsel und Nachtbetrieb. Bis 2025 hoffen die Unternehmer, ihr Portfolio um das Hochbinden der Pflanzen sowie die Gurkenernte erweitern zu können und, ganz wichtig, den viel grösseren EU- und nordamerikanischen Markt zu erschliessen.
Salman ist derzeit auf der Suche nach Investoren, die Floating Robotics unterstützen. Er plant, das Unternehmen Anfang 2023 zu gründen und freut sich auf Gespräche mit interessierten Parteien.
Kontakt/Links:
externe Seite Floating Robotics
Sind Sie interessiert an weiteren spannenden "News for Industry" Storys?
Abonnieren Sie unseren Newsletter
externe Seite Folgen Sie uns auf LinkedIn
Suchen Sie Forschungspartner an der ETH Zürich?
Kontaktieren Sie ETH Industry Relations
Kommentare
Noch keine Kommentare