Neuer Software-Algorithmus macht Quadrocopter sicherer
Forschende der ETH Zürich haben einen Softwarealgorithmus entwickelt, der den Flug von Quadrocoptern auch dann stabilisiert, wenn ein Motor oder Propeller ausfällt. Dies macht sie sicherer und könnte künftig ihren Einsatz beispielsweise für Lieferdienste ermöglichen.
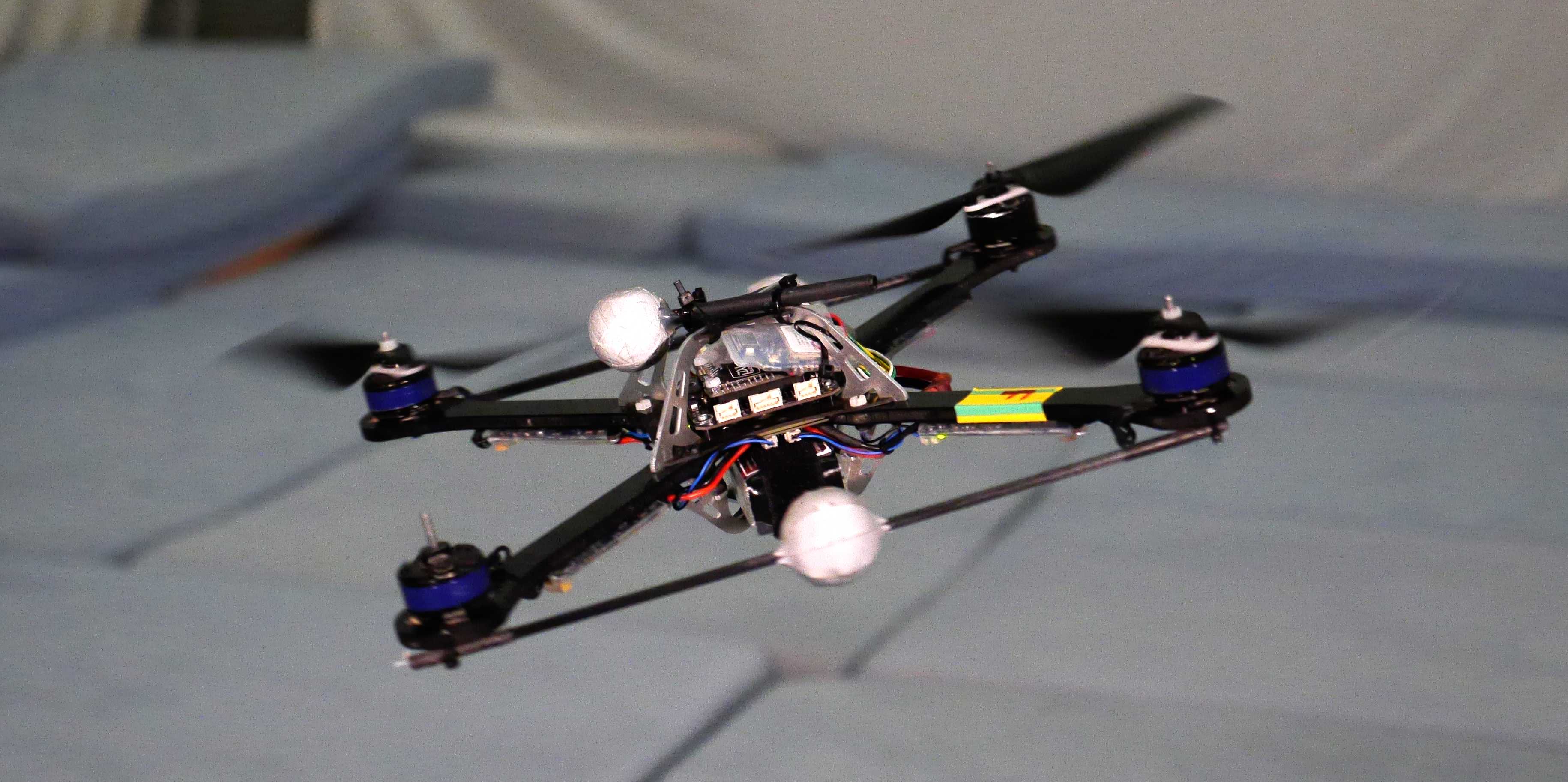
Drohnen wie beispielsweise Quadrocopter sind sehr beliebt bei Hobbybastlern, weil sie so einfach konstruiert und wendig sind. Sie finden aber auch zunehmend kommerzielle Verwendung, etwa für Luftaufnahmen, Erkundungen oder sogar Warentransporte. Erst vor wenigen Tagen kündigte das Versandhaus Amazon an, in nicht allzu ferner Zukunft einen sogenannten Prime Air Service anzubieten, bei dem kleinere Pakete mit Drohnen ausgeliefert werden. Kurz darauf gab auch die amerikanische Paket-Lieferfirma UPS bekannt, ähnliche Pläne zu verfolgen.
Eines der Hauptprobleme bei der Umsetzung solcher Vorhaben ist die Frage der Sicherheit. Momentan schränken strenge Sicherheitsregeln die kommerzielle Verwendung von Drohnen in den meisten Ländern stark ein, so auch in der EU und den USA. Jedoch sind Behörden wie die Federal Aviation Administration in den USA dabei, Regelwerke für die Verwendung ziviler unbemannter Flugsysteme zu erstellen, die einen Lieferservice wie Amazons Prime Air bis 2015 theoretisch möglich machen könnten. Als Jeff Bezos, CEO von Amazon, kürzlich in einer vielbeachteten Fernsehsendung die Forschung seines Unternehmens vorstellte, wie Flugmaschinen für Lieferungen eingesetzt werden könnten, brachte er das Problem auf den Punkt: «Das Ding sollte nicht einfach jemandem auf den Kopf fallen, während er seine Strasse entlang läuft.»
Wenn ein Quadrocopter einen Propeller verliert oder ein Motor ausfällt, kann er mit der üblichen Steuerungssoftware nicht länger stabil in der Luft bleiben und könnte in unmittelbarer Nähe von Passanten abstürzen. ETH-Forschende haben nun eine Software (den sogenannten Failsafe Algorithmus) entwickelt, die Quadrocopter sicherer macht und somit den Weg ebnet für ihren künftigen Einsatz auch in sicherheitskritischen Situationen
Sicherheit über alles
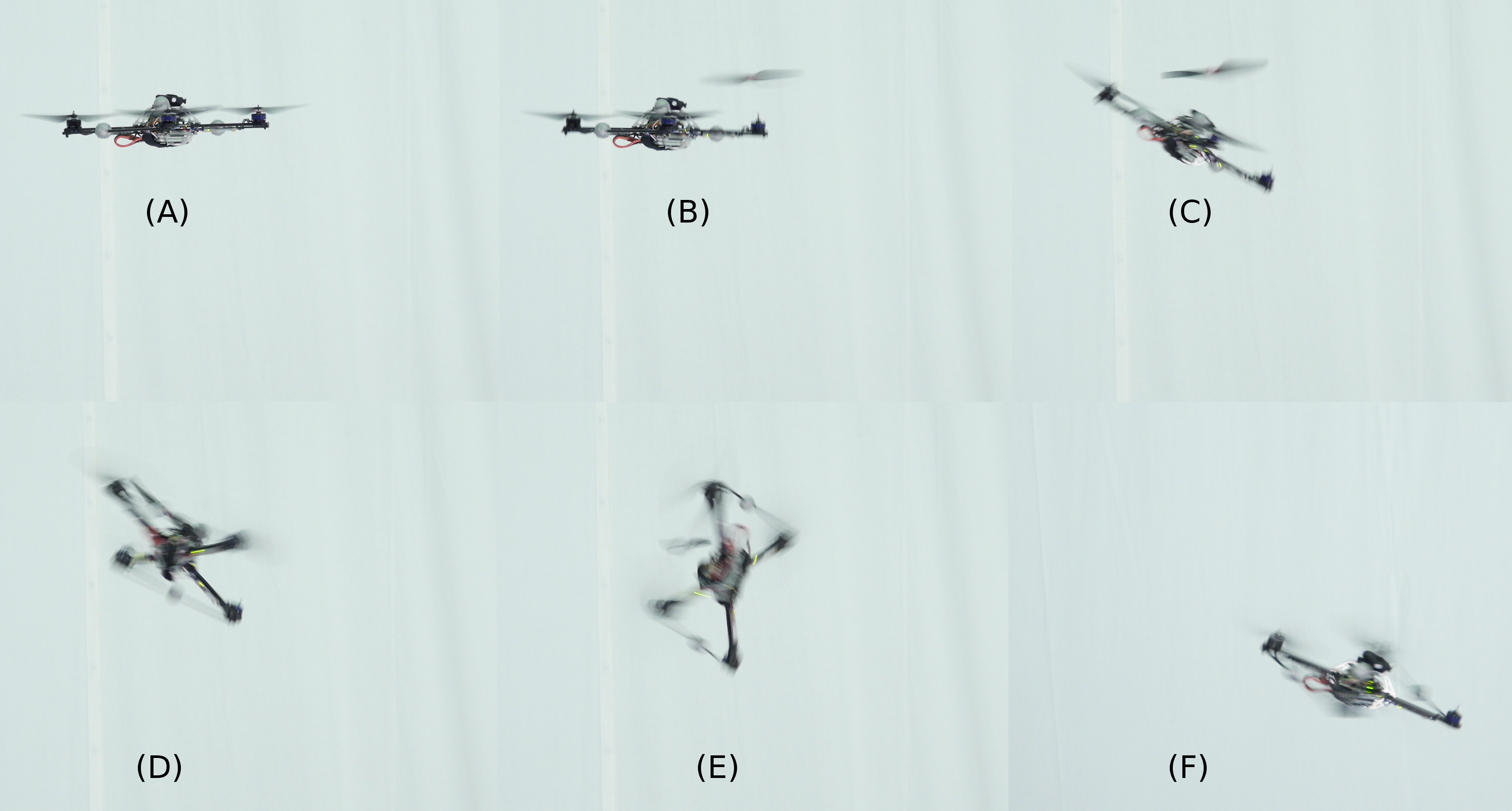
«Wenn unsere neue Software den Ausfall eines Propellers oder Motors feststellt, nutzt sie die übrigen Propeller, um eine kontinuierliche Drehbewegung des Quadrocopters zu erzeugen», erklärt Mark Müller, Doktorand am Institut für Dynamische Systeme und Steuerung der ETH Zürich. Der Failsafe Algorithmus kippt sodann die Drehachse dieser Rotationsbewegung. Über eine zusätzliche Anpassung des gesamten Schubs, der von den verbleibenden Propellern erzeugt wird, kann er die Bewegung des Vehikels kontrollieren.
Bisher überstanden nur Multicopter mit mehr als vier Propellern den Verlust eines Propellers (beispielsweise Hexacopter mit sechs oder Octocopter mit acht Propeller). Aber Hexa- und Octocopter sind tendenziell weniger effizient als Quadrocopter, weil mit jedem zusätzlichen Propeller nicht nur das Gewicht und die Komplexität steigt, sondern auch die Wahrscheinlichkeit, dass einer der Motoren ausfällt.
Einfaches Nachrüsten für Multicopter
«Unsere Failsafe Technologie braucht keine zusätzliche Hardware, es ist ein reines Software-Upgrade. Das bedeutet, dass es einfach in heutige Multicoptern implementiert werden kann», sagt Müller. «Die Software hält einen Multicopter in der Luft und ermöglicht eine kontrollierte Notlandung mit nur drei, zwei oder sogar nur einem intakten Motor.»
Die Technologie baut auch auf früheren Erkenntnissen aus der Flying Machine Arena auf, einer Forschungs-Testeinrichtung an der ETH Zürich. Hier arbeiten Forschende daran, Flugmaschinen, insbesondere Quadrocoptern, neue Fähigkeiten zu verleihen.
Kommentare
Noch keine Kommentare