ETH-Forscher drucken wilde Roboter-Kerle
Forscher der ETH Zürich, von Disney Research Zurich und der Carnegie Mellon Universität haben eine Software entwickelt, mit der selbst ungeübte Benutzer massgeschneiderte Roboter-Kreaturen und deren Bewegungen am Bildschirm gestalten können.
Das klingt nach einem Kindertraum: Hat man den Spielzeug-Roboter satt, gestaltet man in minutenschnelle am Bildschirm einen anderen und druckt dessen Einzelteile mit einem 3D-Printer aus dem Fachmarkt aus. Die Teile fügt man dann wie ein Puzzle zusammen, baut Elektroantriebe in die Gelenke, eine Steuerungseinheit und eine Batterie ein – fertig ist die neue Roboter-Figur.
Einen solchen Traum wahrgemacht hat ein Team von Forschern und Entwicklern der ETH Zürich, von Disney Research Zurich und der Carnegie Mellon University. Im Rahmen seiner Dissertation hat ETH-Doktorand Vittorio Megaro eine Software geschrieben, die es selbst Laien ermöglicht, rasch und einfach die gewünschten Roboter und deren Bewegungen zu gestalten.
Ziehen am Gerüst verändert Form
Nutzerinnen und Nutzer erstellen zuerst das Grundgerüst des gewünschten Roboters. Sie bestimmen, wie viele Extremitäten und wie viele Abschnitte das Rückgrat haben soll. Dieses Gerüst lässt sich beliebig verändern, indem Segmente verlängert, verkürzt und durch Gelenke unterteilt werden.
Die Herausforderung dieses Forschungsprojekts lag darin, die Bewegungen des Roboters so zu entwerfen, dass sie nicht nur digital funktionieren. «Das ist der schwierige Teil dieser Arbeit, in dem die technische Innovation steckt», sagt Bernhard Thomaszewski von Disney Research Zurich. Das Programm biete dem Nutzer nun Werkzeuge, die vergleichbar seien mit denen, die zur Animation digitaler Figuren verwendet würden.
Anders als bei digitalen Animationen müssen bei Robotern allerdings die physikalischen Gesetze beachtet werden. So können die Roboter ihr Gleichgewicht nicht in jeder Pose, die digital möglich ist, halten. Begrenzt seien auch die Beschleunigungen, die die Motoren erzeugen könnten.
«Diese Einschränkungen in die Planung der Bewegungen einzubeziehen, ist für Benutzer ohne Computerunterstützung äusserst anspruchsvoll und für Laien rasch frustrierend», sagt Thomaszewski. «Unsere Software automatisiert genau diese schwierige Aufgabe durch Simulation und numerische Optimierung. Der Benutzer kann sich deshalb ganz auf den kreativen Teil des Entwurfs konzentrieren.»
Machbarkeit und Planung in Einem
Um die Bewegungen der Roboter-Kreatur zu schaffen, muss die Nutzerin lediglich einfache Befehle wie «Vorwärts gehen» oder «links drehen» setzen. Megaros Programm verwandelt diese Befehle automatisch in Steuersignale für die Motoren. Dies ermöglichen es der physischen Figur, sich stabil fortzubewegen.
Ändert nun die Nutzerin das Grundgerüst oder die Bewegungsbefehle, passt das Programm die Motorensteuerungen automatisch an. Dies geschieht sehr schnell, sodass Software-Nutzer das Resultat ihrer Änderungen unmittelbar zu sehen bekommen.
Ist der Benutzer mit seinem Roboter zufrieden, generiert das Programm automatisch dreidimensionale Baupläne für sämtliche Körpersegmente und für die Verbindungsteile, welche die Elektroantriebe aufnehmen. Dem Programm hinterlegt sind Standardgrössen verschiedener kommerziell erhältlicher Antriebe, sodass der Nutzer nur noch den passenden anwählen muss, um die Verbindungsteile zu erhalten. Die Teile werden schliesslich auf einem 3D-Drucker gedruckt. Zum Schluss wird der Roboter von Hand zusammengesetzt.
Günstige Komponenten, teurer Druck
Elektroantriebe, Kabel, Batterie und auch die Steuerungseinheit des Roboters sind kommerziell erhältlich. Megaro hat sich diese Komponenten für wenig Geld im Internet beschafft. Finanziell ins Gewicht fällt hingegen die Herstellung der Roboterglieder auf einem hochwertigen 3D-Drucker.
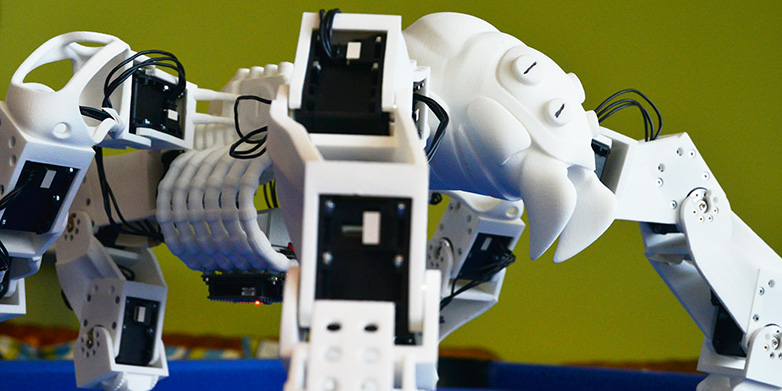
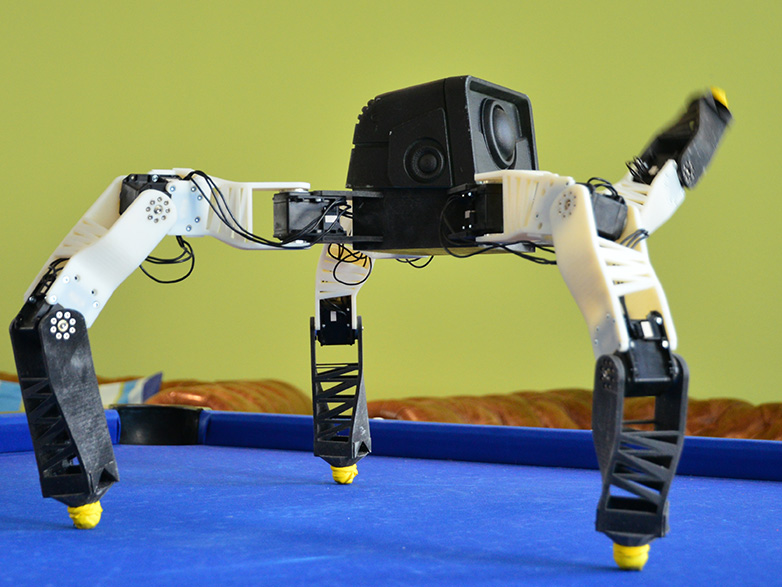
Die ersten beiden Prototypen stellte der ETH-Doktorand noch mit dem hauseigenen Printer her. Das sei günstig, dafür sei die Qualität der Körperteile nicht besonders gut gewesen. Beim ersten Prototypen, einem vierbeinigen Roboterhund, seien die Schienbeine zerbrochen. Sein insektenähnliches Gesellenstück hingegen gab er bei einer externen Firma in Auftrag. Es sei von sehr guter Qualität und bestehe aus hochwertigem, stabilem Kunststoff. «Das hat seinen Preis», sagt Megaro.
Arbeit geht weiter
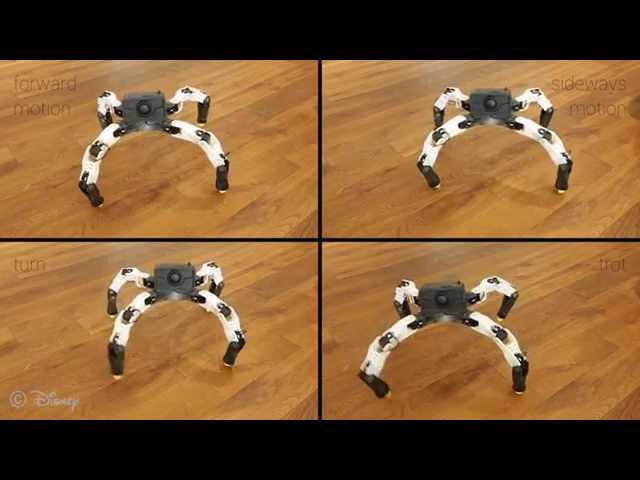
Die Roboter-Kreaturen die Megaro und Kollegen entwarfen, sind bewusst einfach gehalten. So können sie nur Gangarten ausführen, die der Nutzer zuvor mithilfe der Software entwickelt. Megaros fünfbeiniger Insektenroboter kann sich auf verschiedene Weisen vorwärts- und seitwärts bewegen. Hindernisse erkennt er jedoch nicht, denn die Roboter haben weder eingebaute Sensoren noch sind sie für eine autonome Fortbewegung ausgelegt. Auch lassen sie sich nicht fernsteuern, was mit einer App übers Handy machbar wäre. «Es war auch nicht das Ziel des Projekts, einen autonomen Roboter zu erschaffen», gibt der Nachwuchsforscher zu bedenken.
Bisher sei es sehr schwierig gewesen, eine Roboter-Kreatur von beliebigem Aussehen mit Beinen zu entwickeln, sagt der ETH-Doktorand. «Neben Forschung war auch viel Entwicklungsarbeit und Ingenieurswissen nötig, um das Ziel zu erreichen.» Ein System, das diesen Prozess vereinfache und es selbst Laien ermögliche, ihre Kreatur nach eigenen Vorstellungen zu schaffen, habe es bisher nicht gegeben. «Diese Lücke konnten wir füllen.» Die Software ist derzeit noch in Entwicklung und für das grosse Publikum bis auf Weiteres nicht verfügbar.
Literaturhinweis
Megaro V, Thomaszewski B, Nitti M, Hilliges O, Gross M, Coros S. Interactive Design of a 3D-Printable Robotic Creature. ACM SIGGRAPH Asia 2015, October 26, 2015; externe Seite https://www.disneyresearch.com/publication/interactive-design-of-3d-printable-robotic-creatures/
Kommentare
Noch keine Kommentare