Damit Roboter fühlen können
Mithilfe von maschinellem Lernen entwickelten ETH-Forschende neuartige, günstige Tastsensoren. Die Sensoren messen einwirkende Kräfte hochauflösend und präzise. Sie ermöglichen Roboterarmen, empfindliche oder zerbrechliche Gegenstände zu greifen.

Wir Menschen haben keine Probleme, zerbrechliche oder glitschige Gegenstände mit den Händen zu greifen. Über den Tastsinn spüren wir, ob wir ein Objekt fest im Griff haben oder ob es uns bald zu entgleiten droht. Entsprechend können wir unsere Kraft dosieren. Auch die Greifarme von Robotern benötigen eine solche Rückmeldung, wenn sie fragile oder rutschige Gegenstände oder solche mit einer komplexen Oberfläche greifen sollen.
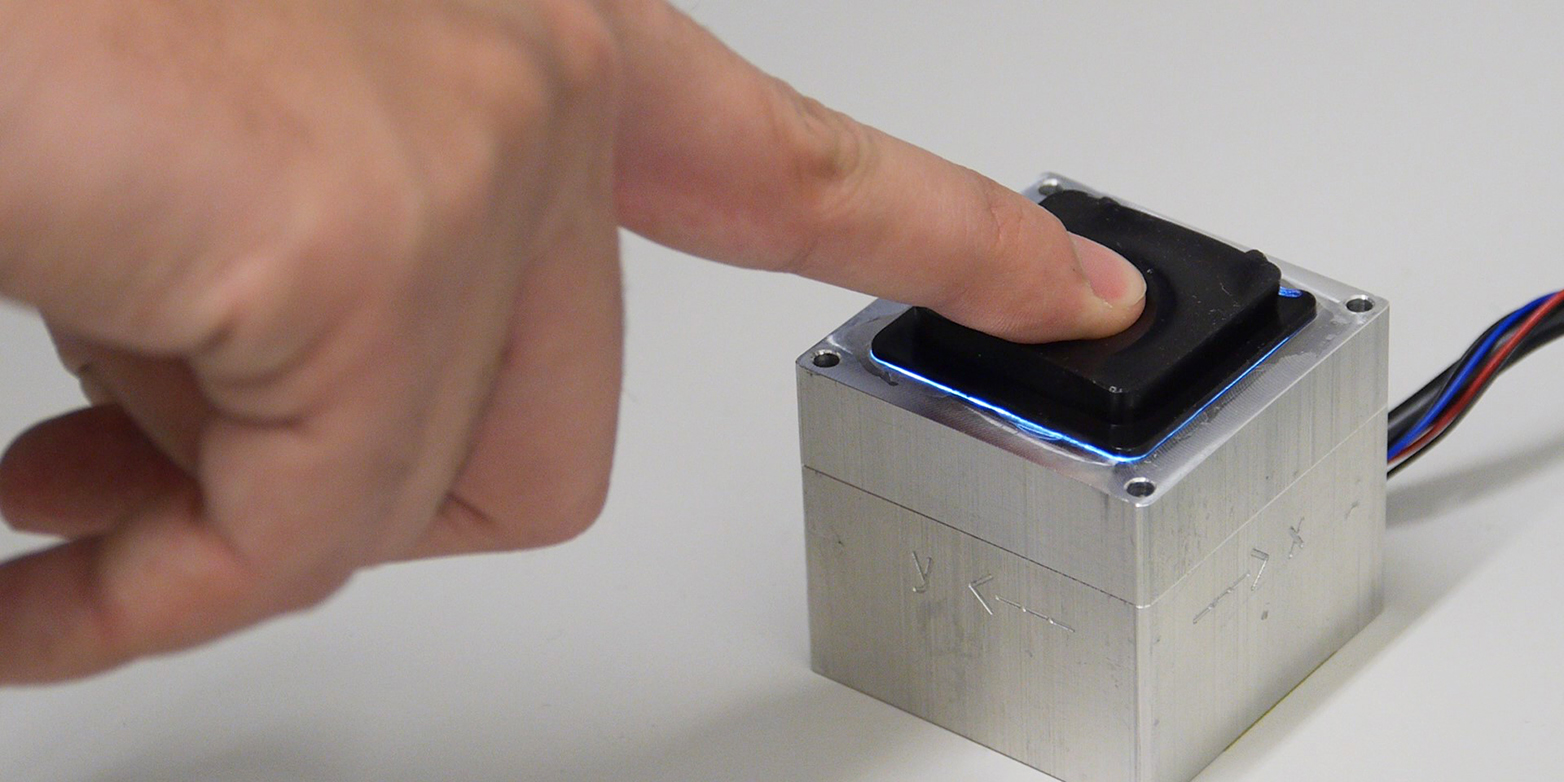
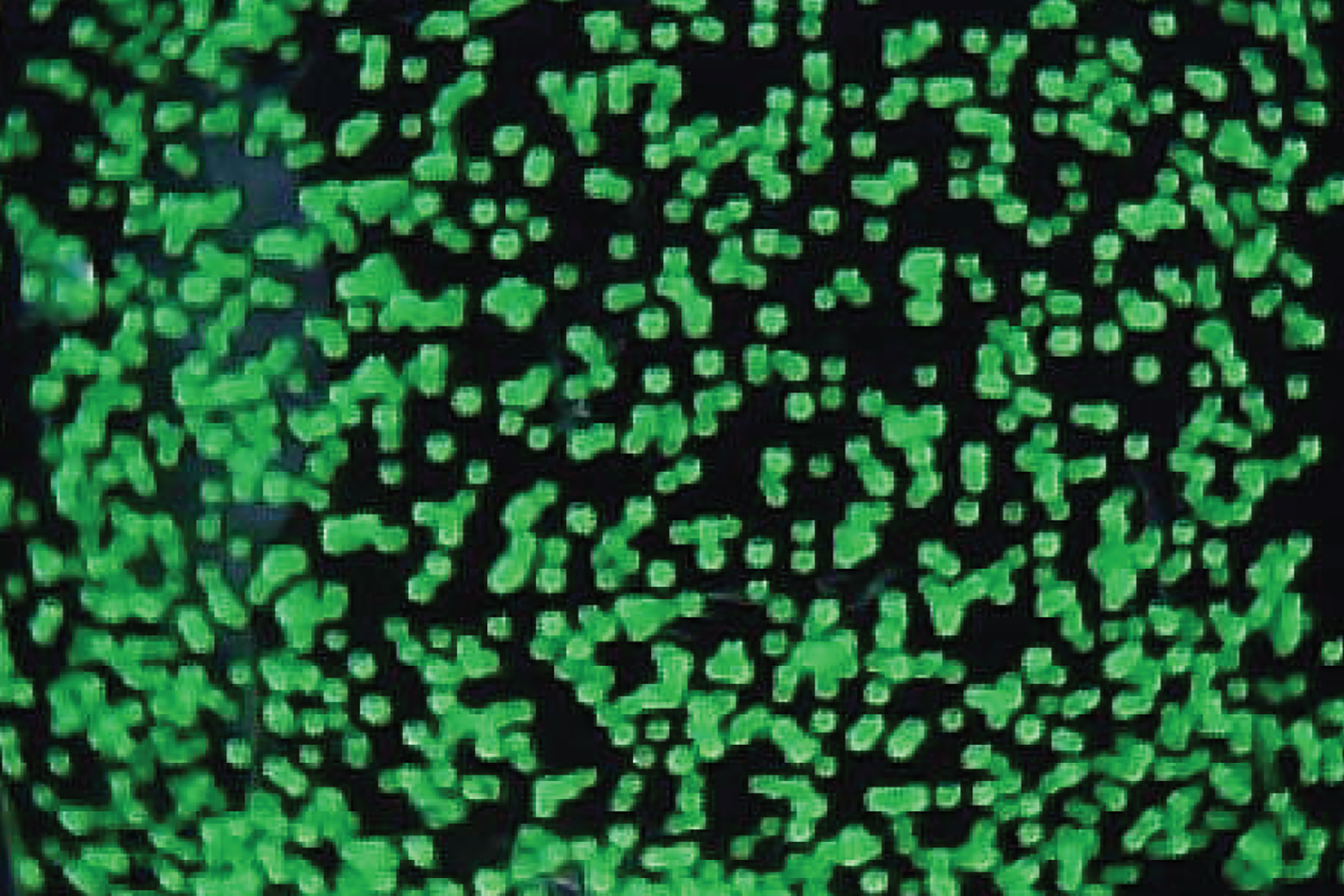
Robotikforschende der ETH Zürich haben nun einen Tastsensor entwickelt, der genau bei solchen Anwendungen zum Zug kommen kann – und somit ein Schritt ist hin zu dem, was die Ingenieure «Roboterhaut» nennen. Der Sensor ist sehr einfach konstruiert und damit günstig in der Herstellung, wie die Ingenieure betonen. Im Wesentlichen besteht er aus einer elastischen Silikonhaut, auf deren Unterseite farbige Mikrokügelchen aus Kunststoff angebracht sind, sowie einer herkömmlichen Kamera.
Rein optische Messung
Der Sensor funktioniert optisch: Berührt der Sensor einen Gegenstand, wird die Silikonhaut verformt. Dabei verändert sich auch das Muster der Mikrokügelchen, was die Fischaugenkamera auf der Unterseite des Sensors registriert. Aus dem Muster lässt sich dann errechnen, welche Kräfte auf den Sensor einwirken.
«Herkömmliche Kraftsensoren registrieren die einwirkende Kraft nur an einem einzigen Punkt. Wir können mit unserer Roboterhaut hingegen mehrere auf die Sensorfläche einwirkende Kräfte unterscheiden und diese hochauflösend und präzise bestimmen», sagt Carlo Sferrazza. Er ist Doktorand in der Gruppe von Raffaello D’Andrea, Professor für Regelungstechnik an der ETH Zürich. «Ausserdem können wir die Richtung bestimmen, aus der eine Kraft wirkt», sagt Sferrazza. Das heisst die Forscher können nicht nur die senkrecht auf den Sensor wirkenden Druckkräfte bestimmen, sondern auch quer wirkende Scherkräfte.

Datengetriebene Entwicklung
Um errechnen zu können, welche Verschiebungen der Mikrokügelchen von welchen Kräften herrühren, nutzten die Ingenieure einen umfangreichen Satz an Versuchsdaten: Sie testeten maschinengesteuert und somit standardisiert eine Vielzahl verschiedener Sensor-Berührungen, wobei sie den Ort der Berührung, die Krafteinwirkung und die Grösse des berührenden Objekts genau kontrollierten und systematisch variierten. Mithilfe maschinellen Lernens gelang es ihnen, diese mehreren Tausend erfassten Berührungen präzise mit den Veränderungen des Kügelchen-Musters in Verbindung zu bringen.

Der dünnste Sensor-Prototyp, den die Forscher bisher gebaut haben, ist 1,7 Zentimeter dick und hat eine Messfläche von 5 mal 5 Zentimetern. Die Ingenieure sind allerdings daran, mit derselben Technik grössere Sensorflächen zu entwickeln, die mehrere Kameras nutzen, und die auch Objekte mit komplexen Formen erkennen können. Ausserdem wollen die Forschenden den Sensor dünner machen – eine Dicke von 0,5 Zentimeter wäre laut ihnen mit derzeit existierender Technologie denkbar.
Robotik, Sport und Virtual Reality
Weil das elastische Silikon rutschfest ist und der Sensor Scherkräfte messen kann, eignet er sich gut, um damit Robotergreifarme auszurüsten. «Der Sensor würde erkennen, wenn dem Greifarm ein Objekt zu entgleiten droht, womit der Roboter seine Kraft anpassen könnte», erklärt Sferrazza.
Mit einem solchen Sensor könnten Forschende ausserdem die Härte von Materialien testen oder Berührungen digital erfassen. Als Wearables konzipiert könnten Radsportler ihre Kraftübertragung auf das Fahrrad respektive die Pedale messen, genauso wie Läuferinnen die Kraftübertragung auf ihre Schuhe beim Joggen. Schliesslich könnten solche Sensoren wichtige Informationen bei der Entwicklung von Berührungsfeedback zum Beispiel für Virtual-Reality-Spiele geben.
Literaturhinweis
Sferrazza C, Wahlsten A, Trueeb C, D’Andrea R: Ground Truth Force Distribution for Learning-Based Tactile Sensing: A Finite Element Approach. IEEE Access 2019, doi: externe Seite 10.1109/ACCESS.2019.2956882
Sferrazza C, D’Andrea R: Design, Motivation and Evaluation of a Full-Resolution Optical Tactile Sensor. Sensors 2019, 19: 928, doi: externe Seite 10.3390/s19040928
Kommentare
Noch keine Kommentare