Der Erkundunggsroboter Glimpse von ETH Zürich und Universität Zürich hat es in die Finalrunde eines Wettbewerbs zur Erkundung von Weltraumressourcen geschafft. Das Fernziel ist der Einsatz in der Südpolregion des Mondes.

In der Südpolarregion des Mondes werden viele Ressourcen vermutet, die für den Betrieb von Mondbasen nützlich sind. Zum Beispiel Metalle, Wasser in Form von Eis oder Sauerstoff in Gesteinen. Um sie aufzuspüren, braucht es einen Erkundungsroboter, der mit den extremen Verhältnissen in dieser Umgebung zurechtkommt. Zahlreiche Krater behindern die Fortbewegung. Die tiefstehende Sonne und dicke Staubschichten erschweren die Verwendung lichtbasierter Messgeräte. Auch die starken Temperaturschwankungen sind eine Herausforderung.
Die Europäische Weltraumorganisation (ESA) und das Europäische Innovationszentrum für Weltraumressourcen ESRIC haben europäische und kanadische Ingenieurteams aufgerufen, Roboter und Instrumente zu entwickeln, die in der Lage sind, in der schattigen Südpolregion des Mondes zwischen dem Shoemaker- und dem Faustini-Krater nach Ressourcen zu suchen und die Umgebung zu kartieren. Dazu müssen terrestrische Erkundungstechnologien an die harschen Verhältnisse auf dem Erdtrabanten angepasst werden.
Halbautonom im Gelände
Einer der dreizehn Mond-Rover, am Wettbewerb teilnehmen, stammt aus Zürich und trägt den Namen Glimpse. Das Akronym Glimpse steht für «Geological Lunar In-Situ Mapper and Prospector for Surface Exploration». Der Roboter, der ein wenig an einen Hund erinnert, bewegt sich halbautonom auf vier Beinen durchs Gelände und ist vollgepackt mit Spektrometern zur Erkennung von Gesteinsarten.
Florian Kehl vom Spacehub der Universität Zürich (UZH) führt das Glimpse-Projekt zusammen mit Hendrik Kolvenbach vom Robotic Systems Lab an der ETH Zürich. Kehl, der zuvor fünf Jahre am Jet Propulsion Laboratory der Nasa am California Institute of Technology tätig war und dort nach ausserirdischem Leben suchte, ist wissenschaftlicher Leiter des Projekts. Kolvenbach ist Gesamtprojektleiter und für die Robotik verantwortlich. Der UZH Space Hub und das Robotic Systems Lab tragen das Projekt je zur Hälfte, beteiligt sind aber auch Forschende und Ingenieure der Hochschule Luzern, der Universität Basel sowie der Firmen Maxon, Anybotics und Metrohm.
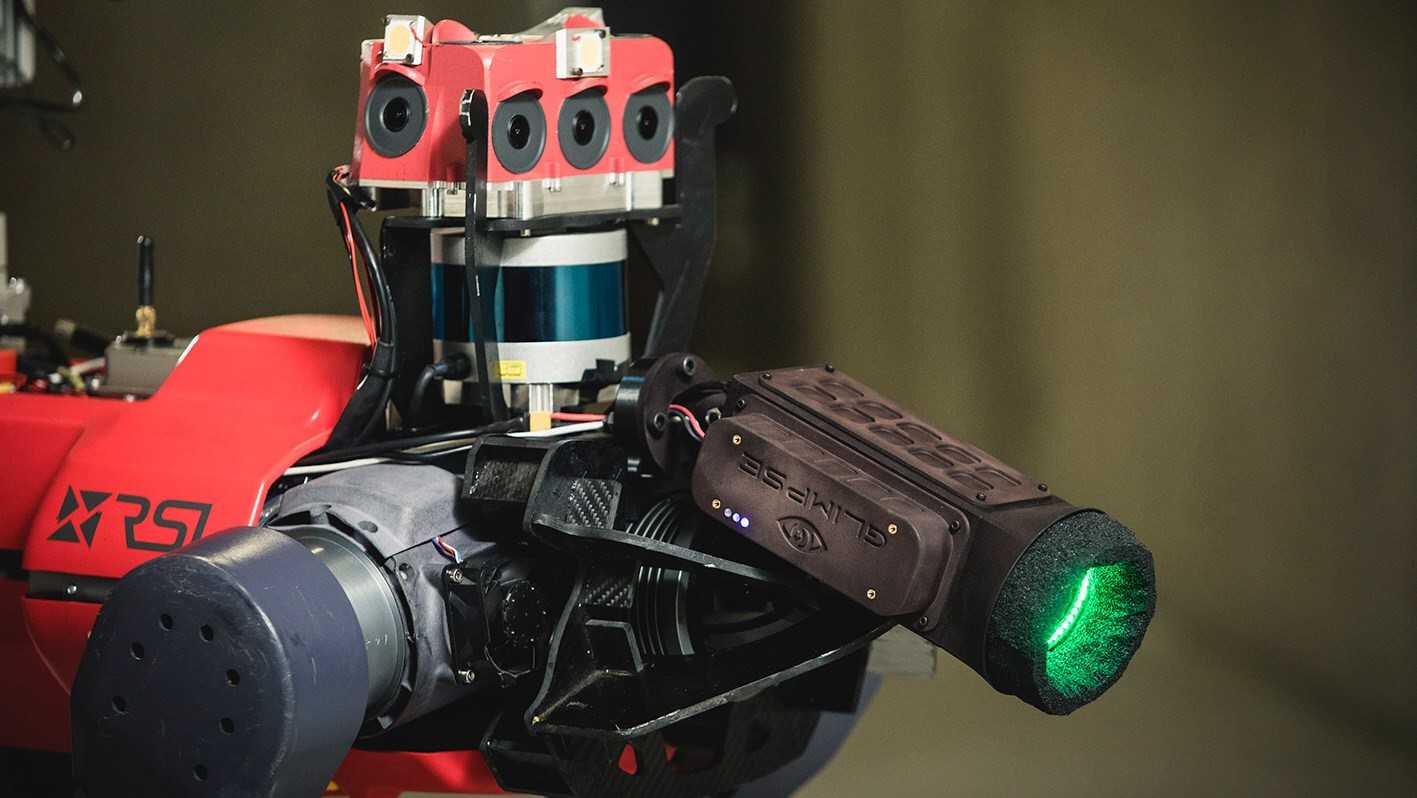
Glimpse basiert robotertechnisch auf dem Robotertyp Anymal des ETH Spin-offs Anybotics. Er ist mit verschiedenen Geräten zur petrografischen und chemischen Gesteinsanalyse bestückt, darunter ein Raman-Spektrometer, ein Mikroskop (für Nahaufnahmen) und eine Zoom-Kamera für Übersichtsaufnahmen und Close-Ups.
Bewährungsprobe in künstlicher Mondlandschaft
Eine erste Bewährungsprobe hat Glimpse bereits erfolgreich überstanden. Zusammen mit dreizehn weiteren Erkundungsrobotern zeigte er sein Können in einer künstlichen Mondlandschaft, die in einem Hangar in den Niederlanden eigens für den Wettbewerb eingerichtet worden war.
Glimpse hatte zweieinhalb Stunden Zeit, um seinen Weg durch die unbekannte Mondlandschaft zum Zielkrater finden und dort das Gestein zu analysieren. «Anschliessend erhielten wir nochmals einenhalb Stunden Zeit für die Auswertung der Daten», erzählt Kehl. «Dieser Zeitrahmen war sehr knapp bemessen.»
Die Teams hatten keinen direkten Einblick in die Mondlandschaft. Navigiert wurde anhand der Kameraufnahmen des Roboters und mit Hilfe von Ortsdaten, die Satellitenbildern nachempfunden wurden. Zu den Schwierigkeiten gehörte, dass die Rover Steuerungssignale zeitverzögert empfingen. Mitunter wurde die Verbindung sogar ganz unterbrochen, um reale Verhältnisse zu simulieren. «Roboter mit ausgereifter autonomer Steuerungstechnik waren unter diesen Umständen im Vorteil», sagte Kehl.
Fürs Finale qualifiziert
Der Wettbewerb zeigte die Stärken, aber auch die Schwächen der Roboter auf: Einige hatten keine ausreichende Beleuchtung, andere hatten Probleme mit den Batterien oder haderten mit der künstlichen Signalverzögerung. Längst nicht alle der dreizehn teilnehmenden Rover schafften den Weg bis zum grossen Krater.
«Auch wir kämpften mit diversen Schwierigkeiten», sagt Kehl. Gegenüber seinen Mitbewerbern, die mehrheitlch auf Rädern oder Raupen fuhren, erwies sich der vierbeinige Glimpse aber als besonders geländegängig und agil. Er bestand die erste Wettbewerbsrunde erfolgreich und wurde mit 75'000 Euro ausgezeichnet.
Das Glimpse-Team arbeitet nun unter Hochdruck daran, den Roboterhund für die Endausscheidung zu optimieren, die im kommenden Herbst in Luxemburg stattfinden wird. Fünf Teams stehen im Finale. Den Gewinnern winken 550'000 Euro, mit denen sie ihren Roboter bis zur Reife entwickeln können. Vielleicht wird Glimpse noch in diesem Jahrzehnt in einer realen ESA-Mission am Südpol des Mondes zum Einsatz zu kommen. Wir drücken ihm schon jetzt die Daumen.
Dieser Artikel von David Werner erschien zuerst in den externe Seite UZH News.
Kommentare
Noch keine Kommentare